在PSoC4平台上开发步进电机控制系统
2)中断函数设计
本文的细分步进驱动算法主要在设定细分步长的定时器溢出中断函数中完成。中断函数处理正弦波1/2周期判断,绕组驱动区间推进,两相绕组电流细分基准值更新和细分微步推进等。图9为中断函数的流程图。
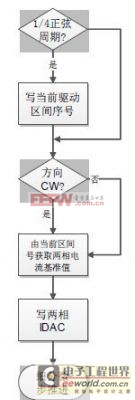
图9: 中断函数流程图③控制系统实验结果
在PSoC Creator环境编译步进电机控制工程,连接PSoC4开发板,双全桥驱动板与两相HB型步进电机,电机可正常运行。图8显示电机运行时的三个关键波形。通道2为相电流实际波形,通道3为相电流经采样放大滤波后的信号波形,通道4为IDAC输出的相电流基准波形。
由图可以看出,电机相电流为平滑的正弦波,且能很好的跟踪细分正弦电流基准。
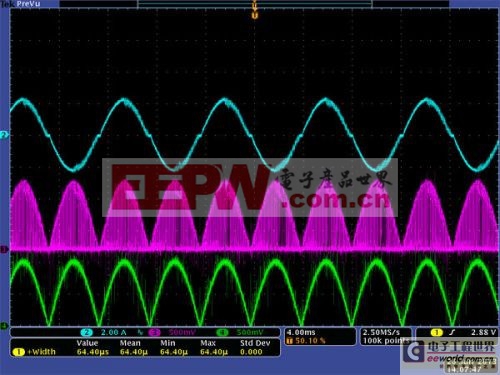
图10: 电机运行时的三个关键波形
6. 小结
本文主要介绍了如何在PSoC4平台上开发步进电机控制系统。作为PSoC家族的最新成员,PSoC4保留了PSoC系列丰富的片内资源和高度的灵活性,而且提供了针对电机控制的富有特色的外设。本文开发完成的实例显示了在PSoC4平台上开发步进电机控制系统不仅直观快捷,而且具有优越的性能和较低的成本。用户可以使用PSoC4设计出优秀的步进电机控制系统和产品。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码