一种基于ARM的航标终端设计方案
3.航标遥测
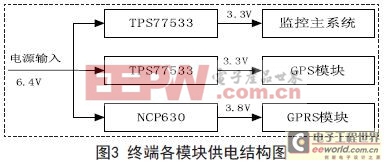
航标遥测遥控终端上电后,由终端的数据采集电路开始工作,采集航标灯的各个工作状态,包括电源的动态电压、静态电压、充电电压、动态电流、充电电流、运行灯质等等。
为降低RTU系统的功耗,采集电路是以一定的时间间隔进行工作(可设置),每次每个参数测量至少10次,然后取平均值作为本时刻的数据,并将这些数据和存储的中心设置参数(阀值)进行比较,判断航标灯是否出现异常情况,如果异常,则由ARM主系统申请进行报警处理。在ARM主系统得到航标运行参数和航标位置参数后,按照规定的数据协议和GSM协议、GPRS协议,进行消息编码,由GSM/GPRS模块实现数据发送。系统采用GPRS实时传输(主)和SMS短消息(辅)两种通信方式,主辅通信方式通过科学组合、自动适应、自动切换,采用抗干扰和过滤设计。传送数据时采用无应答时重发,GPRS不成功转为短消息传送,短消息不成功重启通信模块重新发送,在限时内不成功自动保存,等待网络恢复时补发。
对于处理较为复杂和实时性要求高的闪光灯灯质测量、加速度撞击测量时,先由从CPU(LPC1114)先进行预处理后再交由主CPU(LPC1769),这样可以保证当高性能的主CPU处于低频省电休眠时也不会降低航标终端监测的实时性和报警的及时性,保证在终端处于休眠时也能在线监测航标灯的状态、工作参数、撞击情况、充电和电池情况,出现异常和超限时马上触发报警处理。当GPS模块没有关机时可对浮标的位置持续测量及报警判断;当GSM模块没有关机时,监控中心可以随时查询其实时状态。
4.嵌入式软件设计
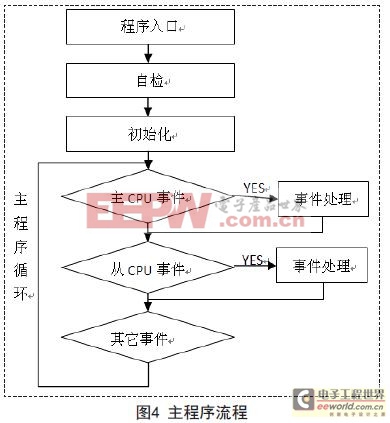
终端嵌入式软件分为核心总控模块、通信模块、定位模块、A/D检测模块、灯质和姿态撞击测量等独立模块以及电源管理模块。总控模块与电源模块协同工作,自带看门狗,能自动检测、自动重启,其它模块出现异常时会自动报警,并且可独立工作,出现故障时不影响别的模块工作。主程序流程如图4所示。
5.结束语
本文提出了一种基于ARM的航标终端设计方案,为了使终端更加灵活高效的工作,本方案采用了双CPU架构设计。在航标遥测遥控系统的控制下,以低功耗的条件实现了航标灯灯质的检测、碰撞检测、差分定位、远程控制等功能,对于建设现代数字航道系统具有重要的作用

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码