利用TLE4921-5U设计差分霍尔速度传感器
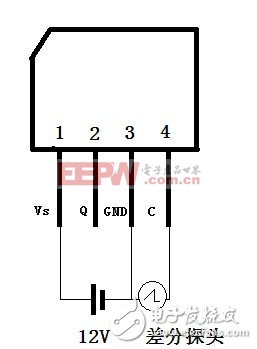
图3:TLE492-5U测试电路
4.数据处理
如表1,标准的TLE4921-5U灵敏度为-5mV/mT,在零磁场或者差分磁场ΔB为零时,直流偏置电压为2V。示波器测得的电压正比于霍尔传感器感应到的差分磁场强度,数据中包含直流分量和交流分量。因为传感器基于差分原理,所以直流分量和磁场偏磁无关。只有交流信号才反应目标轮移动。
表1:TLE4921-5U 参数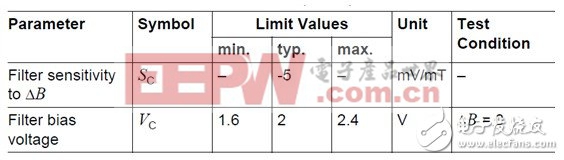
测试时建议使用英飞凌标定好的TLE4921-5U,以保证芯片灵敏度及直流偏置电压在标称范围,从而采集到较理想信号。测试时可以在不同温度条件(如分成常温,高温和低温)以及不同转速下测试目标轮在不同气隙下信号表现。为了便于分析同一目标轮在不同气隙下表现,可将转速台架电机的触发信号作为示波器信号采集的触发信号,从而确保采样信号都是从同一个起始点开始采集。信号采样时尽量保证采样到一个完整周期的目标轮信号,以确保信号准确性。
最后将采集到的信号从示波器中导出到表格中编辑,此时采集到的是差分霍尔电压,并且包含直流信号和交流信号。处理数据时需要去除掉直流信号,并将交流霍尔电压信号转换成差分磁场信号。结合表1的参数,假设差分霍尔电压为V,则差分磁场信号:
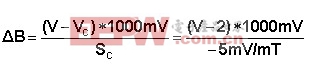 式 4-1
式 4-1
通过上述步骤,便可以采集到需要的差分磁场信号。通过分析差分磁场信号,我们能够获悉目标轮信息(如轴向跳动,齿距对信号影响,加工槽对信号影响等),不同气隙下信号表现(如最大气隙,最小气隙表现等),信号干扰情况,差分磁场信号强度等。
5.参数解释及磁滞算法介绍
在分析数据之前,先简单介绍下几个参数以及传感器磁滞算法,以便更好理解传感器并选择合适产品。
5.1参数介绍
BPre-induction: 是指背磁磁铁的磁场强度,在英飞凌规格书中,差分式霍尔传感器可工作在磁场南极或者北极,其背磁磁场强度范围在-500~500mT,传感器工作在更大的磁场强度下不会造成传感器的损坏,其背磁磁场强度会直接影响传感器气隙表现。
ΔBstatic:是指在零磁场强度或者均匀磁场强度下差分霍尔探头感应到的差分磁场强度,对于英飞凌差分霍尔速度传感器一般要求ΔBstatic 小于30mT,如图7所示,传感器芯片里两个霍尔探头距离为2.5mm(TLE4941PlusC为2.0mm以便更好适应较小齿距的轮速传感器应用),应用时需满足ΔBstatic=|Bp1-Bp2|30mT。如果ΔBstatic大于30mT,可能造成输出信号占空比不良。为了减小静态差分磁场强度,对于背磁感应方式,传感器设计时可在背磁和传感器之间增加导磁片,这样可以使得磁场分布更加均匀,从而减小两个霍尔探头之间静态磁场强度差异。
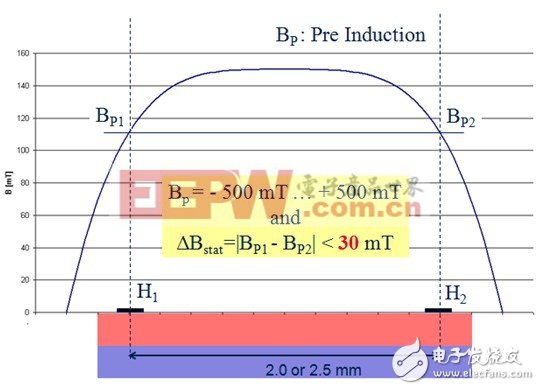
图4:静态差分磁场
关键词: TLE4921-5U 差分 霍尔速度 传感器

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码