高控制/运算效能助力 MCU实现智能照护机器人
利用晶片使机器人进行追踪,由超音波侦测距离,让主系统判断老人的位置,并命令马达动作,使机器人能进行跟随,可随时跟在老人的身边,注意是否有突发状况发生,挥挥手就能与家人视讯通话等功能。
PING超音波距离感应器用于测量与物体间的距离,范围介于3cm?3.3m,容易装置于机器人或自动设备上。超音波感测器利用脉波产生,透过声波喇叭进行一发一收的动作来得到讯号的时间长短,也就是感测器发送讯号至物体而反射后所经过的时间,在经过运算后即能得到精准的距离。为实现追踪功能,超音波定位追踪方法利用主系统晶片产生脉波与判断,使超音波能自动追随物体,也更加稳定照护功能。
为可负载生活必需品,因此行走动力来源选择扭力较大的马达(IG-30GM)做为驱动,搭配耐高电流的12伏特(V)马达驱动晶片(HB-25)来控制直流马达,控制方式为脉波的宽度调变,控制两颗马达的正反转、时间差和转动速度等参数,晶片扮演重要的行动控制机能,车体的前进、后退、转弯等动作。
.Kinect骨架判断
Kinect透过镜头即时撷取使用者的动作,之后并会接着解析相对应的指令。透过内建的红外线VGA镜头发出主动式雷射,在Kinect可扫描的范围内藉由雷射反射过程判断使用者位置,当使用者的身体部位识别完毕后,Kinect会将所撷取到的资料整理成一组骨架图,藉此对应于相关应用。
使用Kinect本身的骨架辨识功能,能模拟出老人的骨架,让主系统监控骨架与动作,判断骨架是否出现或是下降;判断特定动作,启动特定的功能,如图3为人体进入Kinect范围时会出现骨架识别,进而做出不同指令动作。
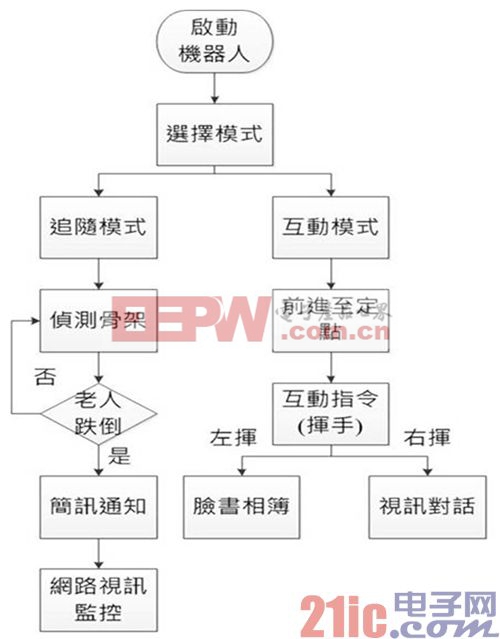
图3 机器人动作流程图
.紧急简讯传送
当老人发生跌倒时,主系统接受跌倒指令数值判断出Kinect所勾勒出的骨架是否下降或消失,并透过紧急简讯功能,立即发送简讯至子女的手机进行通知,家人在查看到简讯后能立即开启网路视讯服务,可于第一时间了解家中老人的状况,并与老人进行对话。
此外,简讯功能可指定手机号码,且更改紧急联络人十分方便。
.脸书动态/互动视讯服务
当老人需要照护机器人进行观看在外子女的动态或联络时,可透过手势辨识,呼叫照护机器人过来至身旁,机器人可透过手势动作判别进行脸书动态服务,可观看子女在外打卡或上传照片,也可利用网路摄影机及网路视讯功能与在远方子女进行视讯对话,随时知道彼此的消息。
执行完整测试项目 机器人实现更安全老人照护
图3为该系统的动作流程图,以微控制器(MCU)做为核心控制(图4),进行数值运算与即时反应,利用微控制器的高运算处理速度来即时完成所有数值接收与指令,让机器人不会因延迟而导致行动不顺畅。
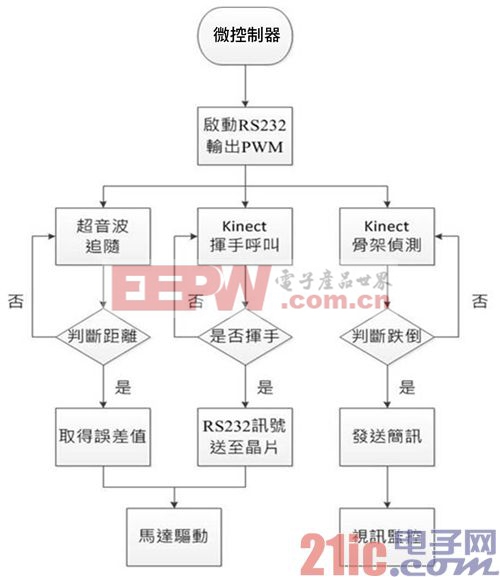
图4 微控制器动作方块图
主系统晶片还须与其他硬体结构说明,以主系统晶片出发,达到所有模组相互结合的应用,进而完成智慧型照护机器人的设计与实现。在实作过程中须进行仔细调整与测试的项目,包括直流马达驱动控制、超音波定位角度追踪、Kinect指令动作方向和机器人追随安全距离。
.直流马达驱动控制
为让本系统达到行动照护,所以直流马达是必定需要的,并使用马达驱动器,控制起来只须调整脉冲宽度调变(PWM),以及马达的正反转、时间差和转动速度等参数,就能让照护机器人行动起来更加顺畅(图5)。

图5 直流马达测试及建置
利用测试方法让马达得以进行正反转动作,再将完成的马达驱动置于该作品底座,里头包含自行设计的电路板、配置电源及最重要的马达驱动器等。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码