如何改善ERM 及LRA 执行器的起动与停止性能

图 3:过驱动及制动与 0-60 加速时间类似
同样,某些执行器有极快的起动时间,而另一些则起动时间极慢。它取决于执行器的设计、制造和类型,所有这些都可以在实验室中进行实验特性化。对于触摸屏智能手机的触觉,用户可能会察觉到一部电话的键盘点击比另一部更灵敏。这是由执行器响应时间决定的。
要改善执行器性能,执行器驱动器可对其进行过驱动,实现更快的起动时间,同时还可反向驱动,实现更快的停止时间。对于 ERM,实现过驱动可在开始时应用更高的 DC 电压,应用负电压可实现制动。
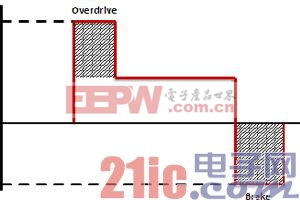
图 4:ERM 过驱动及制动驱动波形
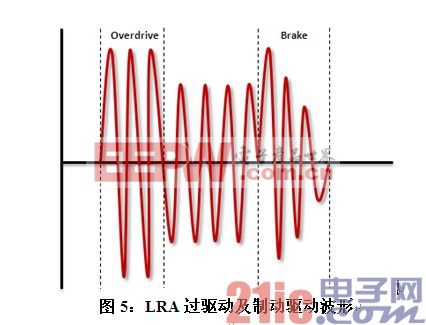
对于 LRA,过驱动是在开始时应用更高的 AC 电压,而实现制动则应用 180 度异相位信号。
德州仪器 (TI) 最新 DRV2605 触觉驱动器具有称之为“智能环路”的特性,其可使用闭环反馈应用,精确过驱动及制动信号,最大限度缩短执行器的起动与停止时间。智能环路是通过主动监测执行器的电动势(反电动势)信号,准确控制驱动器电压与加速实现这一点的。
最终结果是为 ERM 与 LRA 实现可简化软件编程、缩短起动与制动时间 50% 的自动过驱动与制动。DRV2605 的自动执行器诊断与电平跟踪特性可在各种环境条件下实现一致的加速。如果您想获得比同类竞争产品快 0-60 加速,请将 DRV2605 用作测试驱动器。
1
2

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码