红外动目标识别跟踪系统的实现
2 输入输出缓冲FIFO
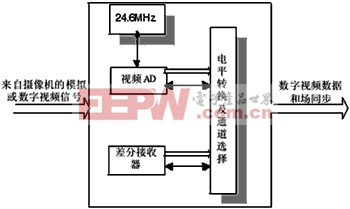
设置输入输出缓冲FIFO的目的是在高速器件和低速器件之间设置一个缓冲区,可以避免高速器件因等待低速器件的数据而使系统的效率降低。A/D芯片送出的数字信号的时钟频率约为12MHz(模拟通道时钟12.51MHz,数字通道时钟12MHz),而处理卡上DSP的总线频率高达50MHz,两者差异较大,所以采用输入输出缓冲FIFO是必要的。基于以上考虑,最终选用Cypress公司的CY7C4275。它的容量为32K×18,最大存取速度可达到l0ns。
3 可编程控制器(FPGA)
在本系统中,FPGA控制了绝大部分单元,包括通道选择/电平转换芯片、输入输出 FIFO、SRAM、DSP、PCI接口电路等。利用FPGA芯片的系统内可编程(ISP)性能,完成所有DSP外围芯片的控制逻辑;并在其中设置状态寄存器、命令字寄存器和专用寄存器,完成与主机的实时通信,接收主机传送的命令信息和向主机传送所需要的状态信息。
在本系统中,数字信道为14bit,模拟为8bit,需要由FPGA对信号进行第一次装配(区别于DSP为了显示而对图像按FGB格式进行的第二次装配),即将数字/模拟信号/数据均转换为16bit的数据,然后将两个16bit数据装配成一个32bit的数据。
4数字图像存储器(SRAM)
红外动目标识别与跟踪系统要完成对运动目标的识别与跟踪。其实现算法必然涉及到对多帧(差分处理,至少两帧)视频图像的处理。为了给实现算法提供较为充裕的存储空间,我们选用的存储器能容纳6场视频图像。因此,最后选用的存储器是Giga SemIConductor公司的两片GS74116,其每片容量为256K×16bit,存取速度为15ns。考虑到我们视频图像每场的数据量为76800像素,两片512K的SRAM可以存下至少6张视频图像。在本系统中,我们设置了4帧图像存储空间,其余空间用于存放目标小图、DSP装配数据等,数据空间具体地址分配如图4所示。

图4 SRAM数据空间分配
5 数字图像处理模块(DSP)
DSP采用TI公司的TMS320C6202芯片。我们采用隔点、隔行的亚抽样。抽样后,每帧图像大小约为20KB,总计约需80KB的数据空间,TMS320C6202的片内数据空间足够所需。我们对DSP芯片的内部空间分配如图5所示。
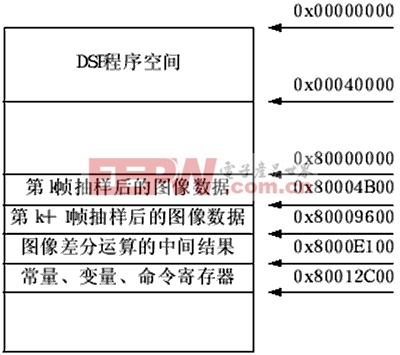
图5 DSP内部空间分配
6 PCI接口电路
由于本系统与PC的接口是PCI接口。为了避免受困于PCI接口繁杂的数据传送协议,充分发挥PCI总线的数据传送能力,PCI接口电路采用PCI9054芯片。它是PCI总线专用接口芯片,具有数据传送快、数据传送简单等优点。在33MHz的PCI总线工作频率下,它的最大数据吞吐能力为132MB/s。
PCI9054与DSP的数据交换或通信是通过DSP芯片内部的两个寄存器实现的,即地址寄存器XBISA;数据寄存器XBD。对PCI9054及DSP芯片而言,它们互相并不能直接访问对方的资源,数据交换必须由这两个寄存器中继,如图6所示。
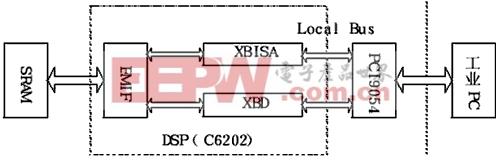
图6 PCI9054与DSP连接图
系统软件设计
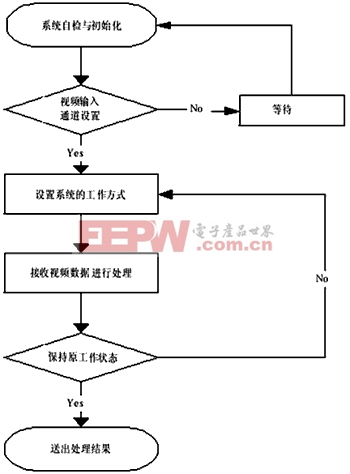
首先进行系统上电自检,查看系统各部分是否进入正常工作状态,并将检测结果送往主机。然后对整机系统进行初始化工作,检测命令字寄存器确定图像的输入方式和系统的工作方式,若主机未指定,则进入等待状态,直到操作员指定系统的工作方式为止,系统进入正常工作。系统软件流程图如图7所示。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码