基于神经网络模型辨识的机器人迭代学习控制方法研究
引言
焊接机械手的轨迹跟踪是焊接机器人控制的难点。机械手是一个典型的非线性动力系统,具有大惯性和大延迟。目前对机械手的控制,主要采用传统PID控制。由于系统复杂性较高,设计人员为建立系统模型做出各种假设和简化,因此数学模型的控制精度会受到很大的影响。本文将神经网络辨识与迭代控制相结合,提出基于神经网络辨识的迭代学习控制策略。该策略能够提高系统控制精度,并使系统在较为广泛的运行条件范围内实现控制系统的控制功能和期望性能,改善系统控制性能。
1 神经网络模型辨识
神经网络具备的泛化能力和快速学习能力为非线性系统辨识提供了有效的途径,神经网络在机器人系统的研究上,充分发挥了神经网络的映射能力,神经网络可解决机器人控制系统中存在的死区、摩擦等非线性问题。神经网络模型辨识在机器人控制中的应用,如图1所示。
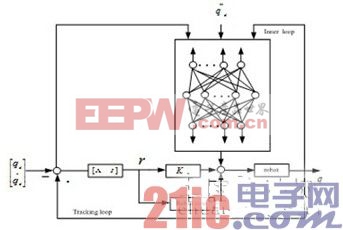
图1 基于神经网络控制的刚性机械手结构图
神经网络系统辨识的特点是不需要建立系统辨识模型,对系统辨识的过程就是通过学习系统输入、输出数据的过程。学习的目的是使误差函数值达到最小,反映出输入、输出数据间的映射关系。若神经网络的输出能够逼近系统在相同输入信号激励下的输出,则可认为神经网络实现了对原系统的辨识,以神经元网络的输出作为实际系统的输出估计。
2 迭代学习控制器的设计
2.1 迭代学习控制
迭代学习控制适合于重复运动性质的被控对象,无需辨识系统的参数,通过迭代修正改善系统控制目标,迭代控制方法不依赖于系统精确的数学模型,可在给定的时间区段上,以极为简单的算法解决复杂的控制问题[5]。
对于n阶线性时变的离散系统,迭代控制模型可描述为:

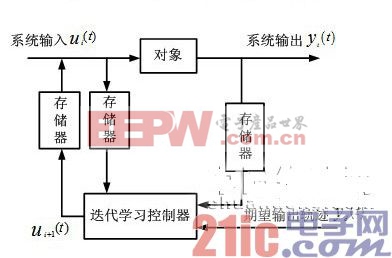
图2 迭代学习控制器
2.2 机器人迭代学习控制器设计
系统控制框图,如图3所示。
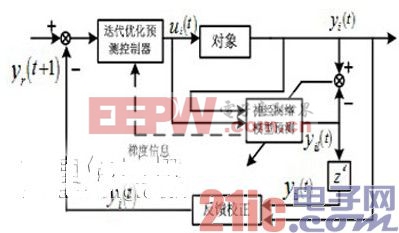
图3 系统控制框图


加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码
