构建基于PXI电子液压制动系统EHB驾驶员在回路混合仿真实验平台
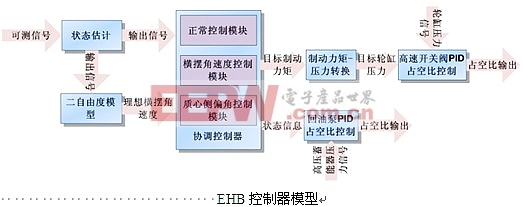
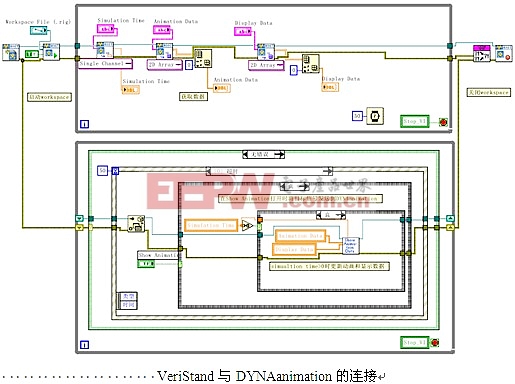
EHB控制器模型在Simulink/Stateflow环境下建模,与上述DYNAware中模型实现无缝集成。模型采用固定步长常微分方程求解器,通过Real-Time Workshop转化为VeriStand支持的dll动态链接库文件。
4、配置VeriStand
在System Explorer Window中导入模型文件,对Primary Control Loop的实时仿真速度进行调整,设置周期为100μsec,则Model Execution Loop的周期为1ms,满足车辆实时仿真的需要。通过分配处理器资源,Veristand能充分发挥双核处理器的并行处理性能,提高实时运行速度。横摆角速度是判断汽车失稳的重要标志,当理想横摆角速度与实际横摆角速度之差超过上下门限值时,通过报警设置以报警音的方式提示驾驶员。
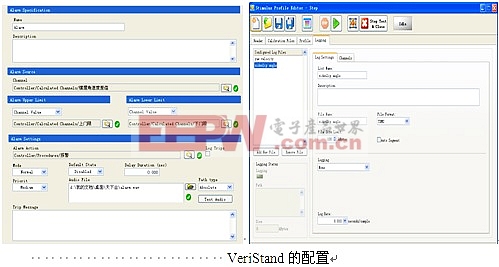
通过菜单界面完成对NI-CAN、NI-DAQ的通道设置,大大减小了程序的开发工作量,提高了开发效率。在Stimulus Profile Editor中设置Logging file,可以对横摆角速度、质心侧偏角、轮缸压力等进行保存。TDMS文件格式读取快速,作为一种测试测量领域的通用数据文件格式,非常适合车辆状态参数的保存。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码