快速公交专用车道检测
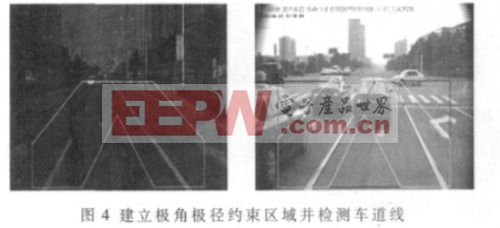
通过建立极角、极径约束区域,可以有效地去除大量的干扰点,滤除旁边车道以及路边树木建筑物的干扰,并能够很大程度地提高算法的运行速度。当车道线的极角极径在检测区域内时,可以快速准确地检测车道线的位置;然而当图像在转弯、变道或者摄像头位置偏移时,车道线很容易超出检测区域,使得结果出现很大的偏差。
3 基于Gabor滤波器的车道线检测
针对道路车道线不清晰以及存在一些其他标志干扰的情况,本文提出了改进的车道线检测算法,即基于Gabor滤波器的车道线检测。通过Gabor找到图像的消失点,即图像中两条车道线的交点位置,再对消失点进行Hough变换,这样不仅提高了算法的适用性,还提高了算法的实时性。
3.1 Gabor变换原理
Gabor滤波器与人眼的生物作用相仿,因此经常用于纹理识别,并取得了较好的效果。Gabor滤波器是带通滤波器, 它的单位冲激响应函数(Gabor函数)是高斯函数与复指数函数的乘积。它是达到时频测不准关系下界的函数, 具有最好的兼顾信号在时频域的分辨能力。高斯函数的局部性特征使得Gabor滤波器只在局部起作用, 即具有良好的尺度特性和方向特性。因此,Gabor滤波器被广泛用于图像处理和图像分析领域。
本文通过对车辙印记以及车道线边缘等一些纹理特征进行分析,从而提取出道路的消失点以及车道线的信息。
Gabor滤波器的模板计算方程如式(2)所示,该模板分为实部(式(3))和虚部(式(4))两部分。
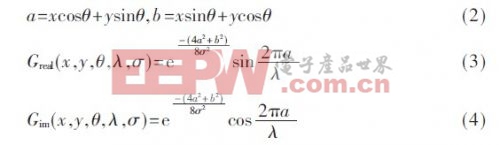
通过建立K×K 大小的Gabor 模板,(x,y) 表示图像空间的一点。其中,θ 表示模板的方向, 为确定最后的道路纹理方向, 这里选择范围为0~72 ;λ 表示路面的波长;σ表示噪声容量, 本文取σ=K/9 .
3.2 消失点的求解
本文用不同方向的模板与图像进行卷积, 对于图像任意一点, 即可得到某一个方向上的卷积的结果为最大值, 这个最大值为纹理方向对应的能量, 该方向为纹理的方向。

其中,α 表示模板对应的方向, 对于图像中的任意点I(x,y) 与α 方向的Gabor 模板进行卷积, 得到不同的t(x,y),求取其最大值, 将最大值对应的方向作为图像中(x,y)点的纹理方向, 同时将该最大值作为纹理方向上的纹理强度。
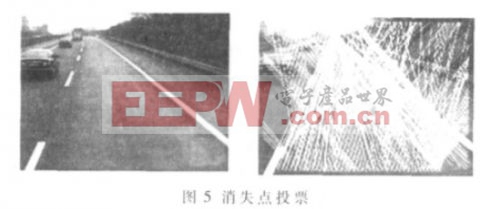
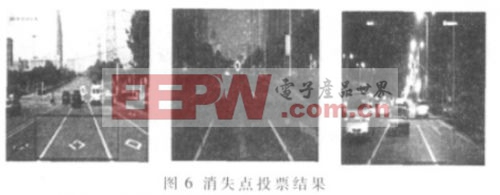
通 过计算可以得到图像中每一点的纹理方向以及能量。为了计算出消失点, 对图像中选取的点进行投票,这里选择图像下方一定的区域点, 如图5 所示。当纹理能量大于设定阈值的点作为投票点,p 表示图像中投票空间的点,θ (p) 表示p 纹理方向,v 表示消失点的候选点,a (p ,v) 表示p 点与v 点的夹角,n 为采用的Gabor 模板方向的个数,R 为定义的投票空间, 即图6 对应的方框区域, 通过vote (p,v) 来统计p 点对v 点的投票结果,votes (v ) 为对R 区域累加进行投票的统计结果,pvote 为最终被投票次数最多的点的坐标, 即消失点。

图6 中的框表示选取的投票区域, 即在该区域内选取400 个点进行Gabor 变换, 求出其纹理方及能量; 圆圈是求出的消失点位置。
3.3 车道线检测
对于传统的Hough 变换, 需要对每个点每个角度进行遍历, 这样比较耗时。本文采用改进的Hough 变换, 对消失点及其周围的有限个像素进行Hough 变换, 求取左右车道线的两个峰值点,并绘制出车道线。该方法能够有效地抑制图像的其他边缘噪声干扰,提高算法的实时性。车道检测结果如图7 所示。


加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码