基于MCU的气压高度表设计
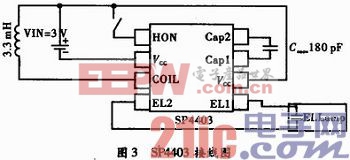
如图3为EL(背光片)驱动电路,应用SP4403MSOP-8封装,电路图中的电感量与电容可根据EL(背光片)大小调整在功耗和亮度之间取得平衡。通过MCU I/O P9.0控制一开关管使其正极电源在所需时接通,一般持续点亮约3 s为省电。
3 系统软件设计
整体软件设计采用汇编与高级C语言。其包含有时钟显示、按键功能、温度、高度、背光及提示音响闹等软件模块。初始化程序包括MCU,I/O接口状态设置、LCD驱动、时钟、气压传感器初始化等。正常显示在时钟模式,Mode为功能选择键,Set为每一具体功能设置键,通过Up,Down键可进行具体数值快速设置,El为背光按键。

当按键Mode选择进入高度模式时,默认值为超低功耗模式,由于每种模式的数据读取频率不同,因此也可根据实际情形转换高分辨率与高速测量模式。并可通过气压传感器3种数据读取频率模式转换可间接选择测量精确度。DRDY-PIN对MCU PB.0发出数据准备请求中断,此时Status寄存器Bit5变为1,读取寄存器Datard8与Datard16共19位有效气压数据。得到的十进制的原始数据需根据下式转换为气压单位是Pa数据值
Pres[Pa]=0.25×Pres[dec] (1)
其中,Pres[dec]是十进制的原始数据。得到的气压数据由于SCP1000-D11气压传感器内含温度补偿,不作修正。因此可根据式(2)换算为当前气压下的高度
![]()
当起步所处参考位置较低时,此时式中Pa=101.324 kPa是标准海平面的大气压,对应的气压高度Ha为0;R为空气气体常数,R=287.052 78 m2/(K·s2);g=9.80 665 m/s2为标准海平面的重力加速度;β=-0.006 5 K/m为温度垂直变化率Ta=273.16K为标准海平面的温度。 Pb是所处位置气压。如能了解参考点的真实标高则可直接设置Ha,可避免高海拔时由于当地海平面的气压与温度有较大浮动时而引起的原理性误差。
经过实际登山测试,绝对高度误差可达到±10 m,240 mA/3 V的纽扣电池最少可使用一年。
关键词: MCU 气压高度表 SCP1000-D11 气压传感器

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码