循迹小车的追踪与避障
3 接近开关排布及其追踪,避障实现
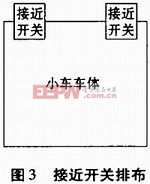
根据障碍物距离接近开关的距离,产生不同的电平信号并送至单片机,随后由单片机控制电机做出相应转向,保证小车跟踪物体或者遇到障碍物时转弯。两只接近开关正向、水平关安装在车头正前方。根据接近开关的原理可知,根据实验测得当其与障碍物之间的距离大于30 cm时,输出端输出高电平(约为3.5 V),小于30 cm时,输出低电平(约为0.5 V)。接近开关排布如图3所示。
4 电机驱动电路
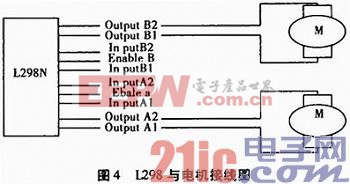
小车左右两侧的驱动轮均由电机驱动芯片L298N来驱动。L298N的输入端和使能端接收来自单片机的信号,控制电机的通断以及正反转,还可以通过向电机控制端输入不同占空比的方波信号来调整电机转速(PWM),其具体管脚连接如图4所示。其中,input端口接控制信号,out put端口接步进电机两端。当输出端B1、B2=01时,电机正转;当B1、B2=10时,电机反转;当B1、B2=00时,小车停止运动。当输出端A1、A2= 01时,电机正转;当A1、A2=10时,电机反转;当A1、A2=00时,小车停止运动。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码