基于干扰观测器的伺服系统PID控制方法研究
4仿真研究
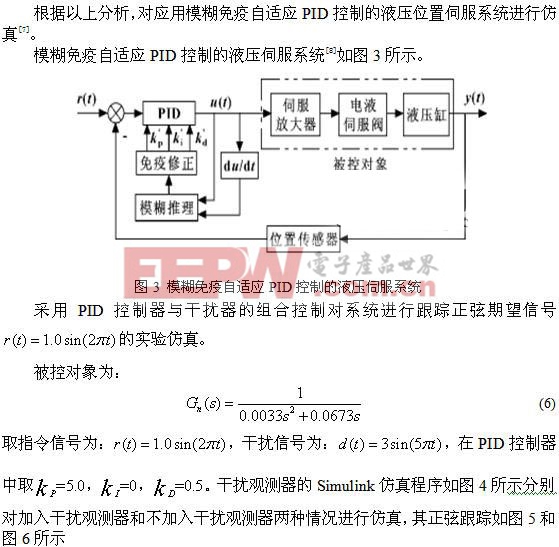
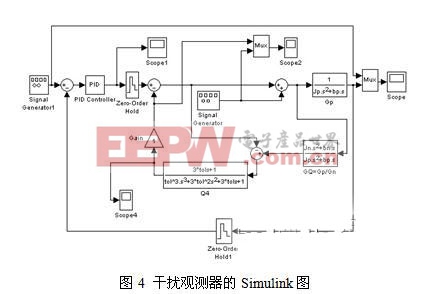
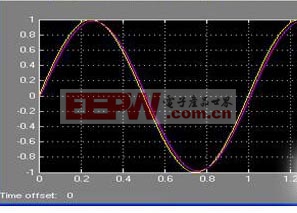
图5 无干扰观测器时的正弦跟踪
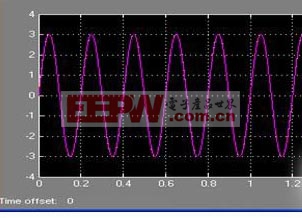
图6 有干扰观测器时的正弦跟踪
5结论
从仿真曲线中可以发现,采用常规PID控制时,在跟踪期望信号过程中,有强烈的极限环振荡且不能很好地跟踪期望信号;而采用PID控制器与干扰观测器的组合控制在跟踪期望信号过程中,干扰观测器对系统和测量信号具有较好的抑制作用,系统的极限环振荡现象消失、其能较好地跟踪期望信号。因此,该控制系统具有较强的适应性和鲁棒性。
1
2

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码



