基于滑模变结构的直流伺服电机控制器设计
2.3切换函数s的选取
2.4控制量u的求取
2.5系统稳定性分析
3仿真与结论
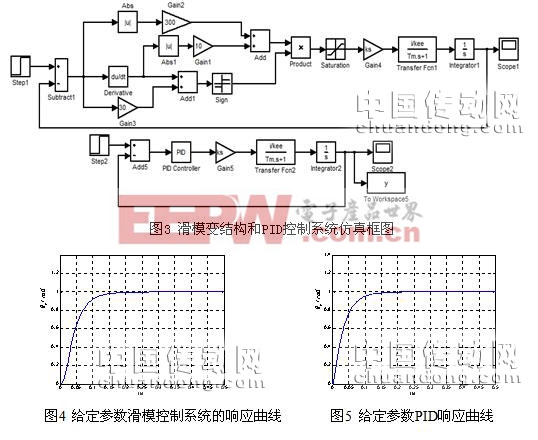
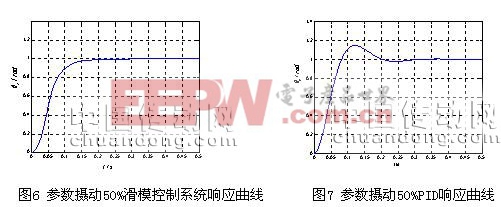
由仿真结果可以看到,显然,当有电机参数大幅摄动时,滑模变结构控制系统能适应系统参数的变化,响应时间很快,很快达到稳态,无超调;而PID产生了大幅度的超调,对于直流伺服电机控制系统而言,超调过大,严重影响加工等过程。
5结束语
本文通过对直流伺服系统分析,并对其设计了滑模变结构控制策略,设计方法简单,易于实现。从仿真分析可知,滑模变结构控制优于PID控制,具有较强抑制参数摄动,自适应强。另外合理地选择切换函数和控制率参数,滑模变结构控制系统具有快速性好、无超调、无静差的优良动、静态性能,而且系统参数摄动时,具有很好的鲁棒性。
1
2

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码