基于超声传感技术的视觉自动识别系统
auto; -webkit-text-stroke-width: 0px"> 在上述方法研究的基础上, 完成了在MOVEMASTER2EX机器人装配作业平台上进行的物体识别与抓取实验. 在自然光及一般照明条件下,对机器人装配作业平台上视场范围内任意放置的3~5 个不同形状、大小的典型工件进行自动识别和抓取,结果表明,识别时间小于5 s(包括识别、定位与抓取过程机械手的移动时间) ,定位误差小于±2 mm ,并具有较好的通用性和可移植性. 图3 (a) ~ (d) 分别是待抓取工件识别过程的图像.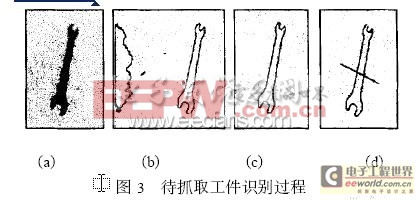
实验结果表明, 采用本文提出的将机器人手- 眼视觉与超声波测距相结合的检测装置, 以及融合二维图像信息与深度信息进行工件识别与抓取的方法,可准确对物体进行识别与定位,具有算法简单、计算量小、实时性好、可靠性高等特点,可为机器人与环境交互提供物体形状、类别及大小等信息,使机器人装配作业能适应各种复杂的环境与工艺过程,对实现工业生产过程的自动化、柔性化、智能化有良好的应用前景.
实验结果表明, 采用本文提出的将机器人手- 眼视觉与超声波测距相结合的检测装置, 以及融合二维图像信息与深度信息进行工件识别与抓取的方法,可准确对物体进行识别与定位,具有算法简单、计算量小、实时性好、可靠性高等特点,可为机器人与环境交互提供物体形状、类别及大小等信息,使机器人装配作业能适应各种复杂的环境与工艺过程,对实现工业生产过程的自动化、柔性化、智能化有良好的应用前景.
1
2

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码

