智能救援机器人的软硬件设计
1.3 控制器电路
由于主控制器的任务较多,电路要求引脚较多,且显示器的控制程序较为复杂,我们单独配备了一个同样的单片机作为主控制器的辅助部分,通过它来分担主控制器的工作,来完成显示部分的工作。其中主控制器与其它模块的连接如图5所示。
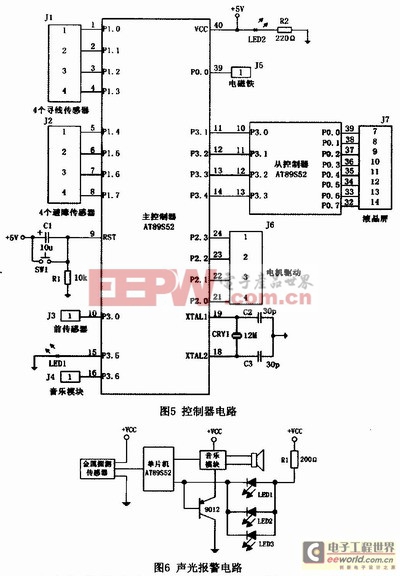
1.4 声光报警电路
声光报警模块主要应用于搜救报警电路中,同时为进一步扩展应用,我们在控制其开关的同时引入另一条信号线实现了对声音的控制。在搜救过程和平安到达安置区时经采用不同频率和音色的声音给出表示。寻找硬币我们采用金属探测传感器,当发现金属时,其信号线上电平从低电平变为高电平,触发单片机中断,在单片机的控制下机器人停止运动,启动音乐发生模块并点亮LED进行声光报警,具体实现电路如图6所示。
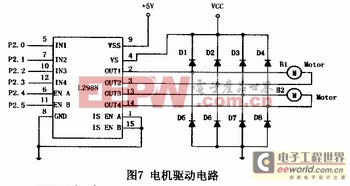
1.5 电机驱动电路
单片机通过传感器的反馈信号控制电机正转、反转或者停止,来实现控制机器人完成各种动作。L298N是专用电机驱动芯片,他可以实现电机的正反转、刹车、pwm调速等多种功能,是对机器人电机进行控制的比较理想的芯片,因此我们采用L298N芯片对两个普通电机进行控制。通过编程完全可以控制实现题目的基本要求和发挥部分,也可增加各种创新功能。L298N芯片信号电源与驱动电源的分开,可以根据需要对电机的电压进行调节,其驱动电路如图7所示。
1.6 显示电路
采用MSl602C-1型LCD显示相应的信息。此显示器模块的工作电压为5V左右,支持显示2行字符,每行可显示16个字符,每个字符由5×7点阵显示。可以通过编程实现多种显示,显示信息比数码管更多,显示效果更好。
由于主控制器的单片机任务较多,电路接线较复杂,我们采用单独的单片机控制显示模块。
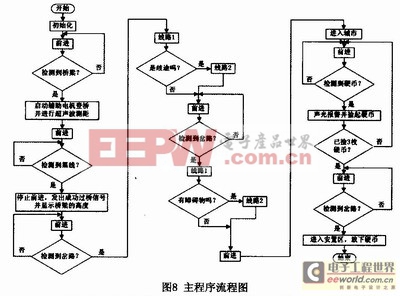
2 智能救援机器人的软件设计
本智能救援机器人的软件控制部分采用C语言编程,借助C语言的强大功能来实现单片机AT89S52的控制功能。主程序流程图如图8所示。
3 结论
以AT89S52单片机为核心部件,利用红外传感检测、电机控制等技术,通过各种方案的讨论及尝试,再经过多次的整体软硬件结合调试,不断地对系统进行优化,最后智能救援机器人可以实现;避开障碍物,并寻找到合适的路径;顺利通过受损的桥梁,并能较准确地测出桥梁的高度;自动识别路线状况,并根据实时状况快速做出判断,准确控制机器人的转向;自动显示所要求的信息;自动寻线前进,能智能检测、捡起、放下硬币;声光报警,并有彩灯闪烁;行驶到规定的地点自动停止并显示救援结束。
在设计过程中,力求硬件电路简单,外形美观,充分发挥软件

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码