基于Haptic技术的盲人辅助路径诱导服务研制
2.4.3 寻径模块
关于寻径问题,即最短路径问题,目前所公认的最好的求解方法是1959年由DIJKSTRA E W提出的标号法,即经典的Dijkstra算法,该算法是目前多数系统解决最短路径问题采用的理论基础[15]。
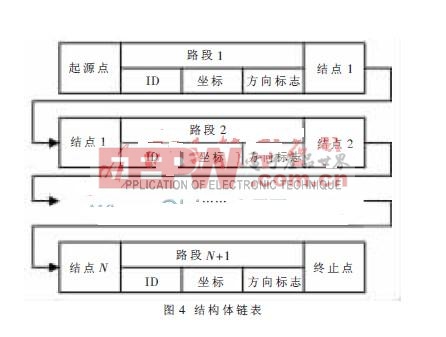
在经典Dijkstra算法的基础之上,在存储结构方面对算法作了一定的改进,使用了一些独特的数据结构,如前趋表和最短路径结构体链表,使算法的性能有了较大的提高,能更有效地求出图中一个顶点到其他顶点的所有最短路径。计算最短路径完毕后,对最短路径经过的所有路段建立单向结构体链表以表示预规划路径,如图4所示[9]。
2.4.4 差异震动提示模块
鉴于常人的触觉灵敏度是视觉的近20倍,而盲人具有敏锐于常人的触觉资源[12]以及震动形式提示具有抗噪声干扰、反馈及时和高有效性等优点,在开发过程中开创性地提出利用差异性震动作为路径诱导的主要驱动力。
Android SDK提供了震动API,首先创建Vibrator对象,通过调用vibrate方法设置震动时间的长短、震动事件的周期等来实现差异性震动。主要核心代码如下:
Vibrator = (Vibrator)getSystemService(Service.VIBRATOR_
SERVICE); //创建Vibrator对象
vibrator.vibrate(new long[]{t1,t2,t3,t4},repeat);
//调用vibrate方法设置震动(以4个参数为例)
在Vibrator构造器中有4个参数,其中t1、t3是等待多长时间启动震动, t2、t4是震动持续时间, 单位为ms(1 000 ms=1s);repeat用来设置是否重复震动,当repeat=0时,震动会一直持续,若repeat=-1时,震动只会出现一轮。
3 系统测试与讨论
为了验证本路径诱导新模式的实用性和可靠性,选用小区域地图数据供系统测试,以大学校园为测试区,并自制了校园的简单地图来进行实地路径诱导测试。
测试环境选在室外较为空旷地带,当获取的GPS定位信息满足路径诱导定位需求时,运行程序并载入地图。寻径模块根据输入的起始位置与目的地规划出一条最适路径,再根据预设的偏离路径阈值、震动持续时间和周期,在行走过程中,当不同程度的与规划路径偏离或到达路口节点时,能够以不同形式的震动提示报警,测试者能明显地感觉到震动的差异性,从而达到测试目的。
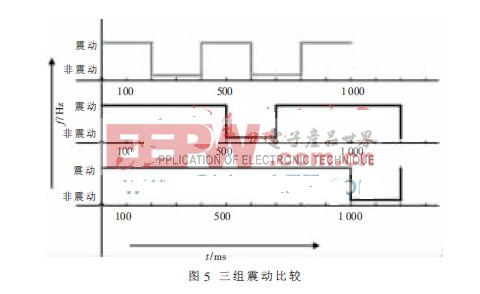
根据设置等待时间、震动持续时间以及是否重复震动的不同来控制震动的差异性。在此设定轻微偏离路径为短震动,严重偏离路径为长震动,而到达路口节点为一般震动,以此三组为例加以讨论说明。(1)短震动4个参数设置为vibrator.vibrate(new long[]{200,200,200,200},0),震动持续时间、等待时间均为200 ms;(2)一般震动4个参数设置为vibrator.vibrate(new long[]{200,500,200,500},0),震动持续时间和等待时间分别为500 ms和200 ms;(3)长震动4个参数设置为vibrator.vibrate(new long[]{200, 1 000,200,1 000},0),震动持续时间为1 000 ms,等待时间为200 ms,这三组震动主要基于震动持续时间区分,具体如图5所示。根据测试能够明显地感觉到震动的差异性,较易区别。后续工作还可以考虑震动频率大小来设计震动差异性等。
本系统实现了盲人路径诱导所必须的基本功能,能够有效地对两地点间路径进行最优规划并提供差异性震动提示,使用户高效、及时、准确地行走。对于日益成熟的语音导盲来说,当在极其嘈杂的环境中时,语音功效就会大打折扣甚至失去作用,而这种差异性震动路径诱导新模式的研制则能很好地弥补语音的不足,二者的集成使用将增强盲人路径诱导服务系统的环境适应性,增大了其市场化的潜力。
参考文献
[1] 夏岳勇,杨峻.盲人导航仪[J].医疗设备信息,2007,22(1):111-113.
[2] KUC R. Binaural sonic electronic aid provids vibrotactile cues for landmark,reflector motion and surface texture classification[J]. IEEE Trans on Biomedical Engineering,2002,49(10):1173-1180.
[3] RAN L, HELAL S, MOORE S. Drishti: An integrated indoor/outdoor blind navigation system and service[C]. Proceedings of the second IEEE Annual Conference on Pervasive Computing and Communications, Florida ,USA,2004:23-30.
[4] MORI H, KOTANI S, SANEYOSHI K, et al. The matching fund project for practical use of robotic travel aid for the visually impaired[J].Advanced Robotics,2004,18(5):453-472.
[5] 陈美銮,尹浩,黎飘,等.智能盲人导航仪的设计与实现[J].电子技术应用,2006,32(10):4-6.
[6] 贺菊方,潘国华,何俊峰.用于帮助盲人行走、识别障碍物的电子装置[P].中国专利,CN2843397.2006-12-06.
[7] 宁志刚,杨保柱,杨玲,等.一种新型盲人导行识别系统的设计[J].电子技术应用,2010, 36(6) :141-143
[8] 何婧,聂F,罗兰,等.听觉引导助盲系统[J].生物医学工程学,2010,27(2):467-470.
[9] 徐珠宝,许勇,杨军.Windows Mobile平台下的盲人导航软件系统开发[J].计算机与现代化,2010(10):116-119.
[10] AMEMIYA T, SUGIYAMA H. Haptic handheld wayfinder with pseudo-attraction force for pedestrians with visual impairments[C]. Proceedings of the 11th International ACM SIGACCESS Conference on Computers and Accessibility, New York,USA,2009.
[11] YAO H Y, GRANT D, CRUZ M. Perceived vibration strength in mobile devices: The effect of weight and frequency[J].Haptics,IEEE Transactions on, 2010,3(1):56-62.

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码