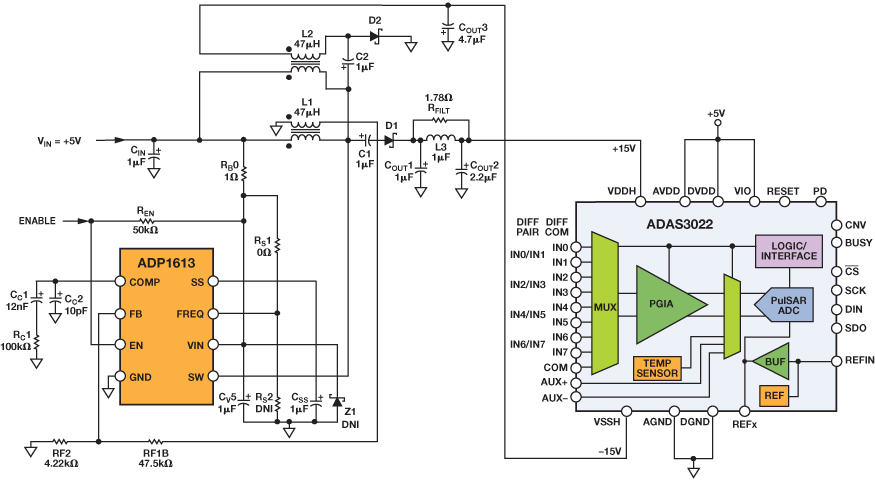
液压油缸内壁参数测量数据采集处理系统
3.2 数据处理
用4个电感位移传感器测量油缸内壁的参数,其根本原理是通过把测量截面的4个传感器所测得的位移变化量,转化为其所在坐标平面内的坐标值,然后通过这4个坐标值,利用最小二乘拟合,拟合出此油缸被测量截面的实际圆心位置坐标和油缸直径。该测量过程的关键点在于将电感位移传感器所测量的变化转换成对应的坐标值的变化。在理想的情况下,夹具上所安装传感器的轴线正交,轴线的交点和标准环规的中心重合,以此相交轴线为坐标轴、相交点为原点建立直角坐标系,那这4个位移传感器所测得转化的坐标则分别为(x1,y1),(x2,y2),(x3,y3),(x4,y4)。
3.2.1 最小二乘拟合原理
假设所测量截面为XY,4个位移传感器所测量转化后的位置坐标分别为P1(x1,y1),P2(x2,y2),P3(x3,y3),P4(x4,y4)此4点均在所拟合的圆上,理想圆方程为
。若(x0,y0)不是足够小,会带来线性误差,这时需以求得的圆心坐标(x0,y0)为新坐标的原点,对测量数据点进行坐标平移后在进行最小二乘拟合,直到求得坐标(x0,y0)为足够小。本测量系统的拟合圆心坐标(x0,y0)足够小,所以测量坐标不用进行坐标变换。
3.2.2 误差处理
系统的测量误差主要包括温度变化引起的测量装置变形误差,传感器精度误差,传感器安装误差等,由于测量环境可以进行恒温控制和所选传感器为高精度传感器,所以上述前两项误差可以忽略不计,但传感器的安装误差应该予以消除。传感器的安装误差可分3个方面:
(1)坐标系原点偏心误差,即安装位移传感器的正交轴线的交点和被测件的中心有一点偏差。
(2)位移传感器安装轴线非正交引起的坐标位置误差。
(3)位移传感器安装轴线非正交和理想坐标系原点偏心误差在测量时所带来的误差。
由上述拟合方法,经所编写的软件进行实时数据处理,即可快速地得到油缸的直线度、圆柱度和油缸半径。图3为测量系统的软件界面。
4 结束语
介绍了的液压油缸内径参数检测的数据采集处理系统,测量精度高、效率高,可用于在线检测的环境中,通过测量出液压油缸内壁的直径、直线度、圆柱度等参数,可快速地检验其产品是否符合出厂精度要求,具有很强的实用性,该系统可在产品的深孔参数检测领域内进行推广。
1
2

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码