新型半主动激光制导实物仿真系统设计与实现
摘要:设计并实现了一种激光半主动制导实物仿真系统,系统主要包括光电探测、信号处理和伺服部分。介绍了系统的工作原理以及主要电路的设计。该系统体积小,操作方便,控制灵活等优点。实际应用结果表明,该仿真系统对模拟激光目标的跟踪稳定,具有良好的实时性和较强的实用性。
关键词:激光制导;半实物仿真;峰值保持;电路
随着以计算机为代表的信息化技术的飞速发展,半实物仿真技术在国内外的航空航天、通信等众多军用和民用领域都发挥着重要作用,具有费用低,开发周期短等特点。激光半主动制导半实物仿真系统在激光制导武器的研究、试验、作战仿真和教学训练中有重要作用。为测试激光制导干扰设备对激光制导的干扰效果,开发研制了该系统。
1 系统组成及工作原理
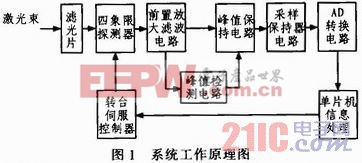
该仿真系统主要由光学系统、光电探测器、信号处理电路和伺服系统组成。系统的工作原理是这样的:用NdYAG模拟激光源发射经过编码的激光束,经过滤光片照射到四象限光电探测器,光电探测器将接收到的激光光信号转变为电信号输出给后续处理电路。光电探测器输出的电信号进过自适应前置放大滤波电路、峰值保持电路和AD转换电路,进入微处理器,通过光斑检测四元定位算法,解算出目标光斑偏离中心的偏差即偏离目标光源中心点的脱靶量,根据脱靶量形成对伺服系统的控制指令,二维转台伺服控制系统根据控制指令调整导引头的姿态,稳定跟踪模拟目标光源,原理流程框图如图1所示。
系统光电探测器组件采用中国电子工业集团公司第四十四所生产的GD4311Y四象限光电探测器。它具有可控增益、响应速度快、盲区小、噪声低;均匀性、对称性好等特点,在激光定位、激光制导等方面应用广泛。它的光敏尺寸为φ8 mm,响应波长范围为850~1 064 nm。为了增强探测效果,滤除背景和噪声的干扰,在探测器前加装了滤光片,对进入到探测器的激光进行了过滤。二维转台伺服系统为双自由度高精度数字云台PTO1502,前后俯仰72°,水平旋转-157°~157°,RS485通信接口,24 V/3 A直流供电,70多条默认缺省指令集,指令响应时间12ms。
2 硬件电路设计
2.1 前置放大电路
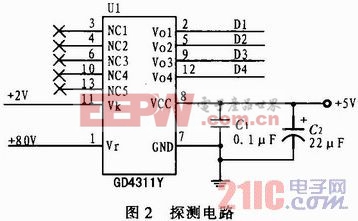
GD4311Y四象限探测器电路如图2所示,其中U1为GD43311Y探测器,D1、D2、D3、D4为四象限电流信号输出,+80 V的作用是给探测器提供的典型偏置电压,+2 V的作用是给探测器提供增益控制电压,+5 V的作用是给探测器提供的正电源,为了保证电源稳定,在正电源与地之间必须接入100 pF的电容。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码