基于STM32F107的搬运机器人电机控制系统设计
2.5 舵机控制任务
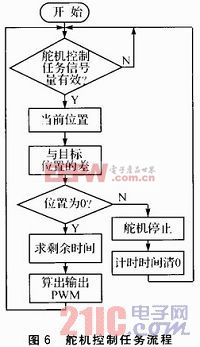
舵机控制由一个定时器产生基准时间,每隔固定时间发送信号量,任务都将执行一次。舵机控制任务将对绝对值编码器测出的位置和给定的位置进行比较,根据剩余时间调整舵机的转速。舵机控制任务流程如图6所示。
3 系统机电接口
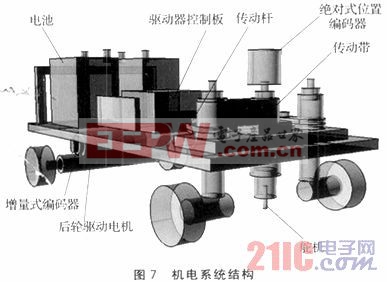
机器人的舵机由直流电机外连一个30:1的减速机组成。绝对式位置编码器同舵机相连,将舵机的角度信号送到驱动器控制板中。机器人前轮的两个轴由传动杆相连,其中一个轴由传动带与舵机相连,这样在舵机转动时,传动带带动传动杆,保证两个前轮能够同步转动。后轮驱动电机为直流电机,直接与增量式编码器相连,经减速比为25:1减速机减速后,经机械差速器驱动后轮转动。增量式编码器的信号同样送到驱动器控制板中。机电系统结构如图7所示。
结语
本文实现了搬运机器人的电机和舵机控制器硬件的设计,成功地在STM32F107上嵌入了实时操作系统μC/OS-II,完成了电机和舵机的转速闭环实验。利用Cortex-M3内核控制器和μC/OS-II系统多任务实时性的特点,为后续的机器人图像视频采集和导航寻迹提供了软硬件基础。如果对现有PI算法进行改进,并且能够实现电机速度和电流双闭环控制,则机器人电机的特性将会更好,搬运机器人的应用前景将更加广阔。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码