基于Cortex-M3的矿井车循迹系统设计
对于整个模糊控制器决策,在t时刻采样周期内,由公式(2),根据路径误差和误差变化率E,EC,由模糊判决表查出相应的U,并由量化因子ku计算得到实际控制输出C。控制算法实现步骤如下:
1)计算拥塞控制系统的输入状态。
2)根据参考模型的输出与实际对象输出计算e,ec。
3)根据参考模型误差和误差变化率E,EC。
4)计算规则自校正模糊控制器的输出U。
5)由模糊控制的量化因子计算最终的实际控制输出C。
4 仿真研究
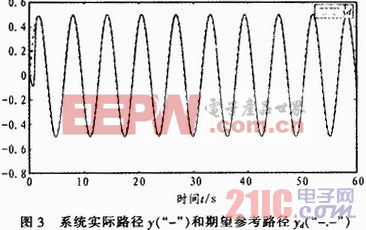
该系统设计及软件算法研究在Matlab 7.0环境下进行软件仿真。预先设定小车运行的期望轨迹为yd,根据模糊控制方法设计的小车实际运行轨迹为y,仿真的目的是检验该系统设计的小车,在运行过程是否能根据预设的轨迹运行。仿真的结果如图3所示,横轴为运行时间,纵轴为运行的距离。仿真结果显示,小车运行初始状态,不同出发点时与期望路径有偏差,可能达到50%以上;在运行过程中,小车运行逐渐接近预设的轨迹,其后整体的偏差小于5%。系统运行稳定以后,在给定期望轨迹下,探测小车系统能较好的跟踪期望轨迹。
5 结论
该小车探测系统采用基于高性能Cortex-M3处理器,图像传感器、温度传感器和红外探测器综合设计的硬件平台,软件设计采用模糊控制策略的思想,提高了系统的可靠性和稳定性。该测试系统在专业仿真软件平台Matlab下进行,仿真实验结果表明,小车系统能较好的实现探测、数据采集、跟踪轨迹等功能,达到了设计要求。
1
2

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码