直流电动机的非线性控制研究
1.2 输出选择
控制目标是,给定角速度ω0,当负载变化或有扰动使角速度发生变化时,调节励磁电流ir,即状态x3,使角速度在ω0。稳定。因此,可选择输出函数为:
y=h(x)=ω-ω0=x1-ω0 (5)
系统可描述为:

2 输入/输出线性化设计
2.1 y=h(x)=x1-ω0的相对阶
当k=0时:
Lgh(x)=△hg(x)=[1 0 0]g(x)=0
当k=1时:

所以,在x2≠0的每一点,相对阶r=2。
2.2 状态方程变换
构造一组新状态变量z=[ξ1 ξ2 η]T=φ(x),使得:

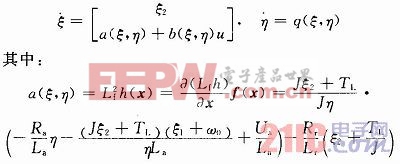
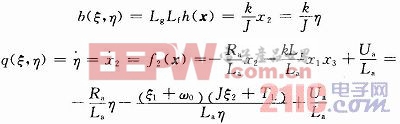
可取η=φ3(x)=X2,变换φ(x)在X2≠0的区间内定义了一个微分同胚,可将式(6)描述的非线性系统变换成如下形式:
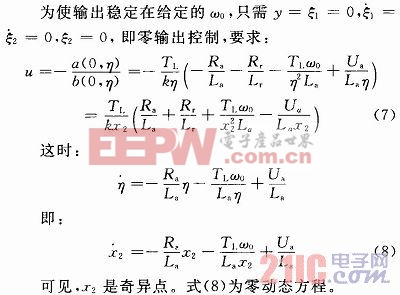
2.3 求解控制律

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码