基于DSP的GPS定位解算算法研究与实现
1.2 伪距的获取
分析GPS定位解算算法可知,要解算用户的三维位置和时间偏移量,首先需要获得各颗卫星的位置和相应的伪距观测量,因此,伪距观测量的精度直接影响到用户位置解算的精度。
在GPS接收机中,可以任意选择一个时刻作为本地参考时间,本地参考时间与GPS系统时间的差值即为时间偏移量tu。对于GPS信号发射时间而言,如果不考虑每颗卫星的时钟修正项,所有卫星的导航电文子帧1的起始点都是在同一时刻发射的,因此可以认为不同卫星的导航电文子帧1的发射时刻是相同的,但是不同卫星的子帧1的起始点是在不同时刻接收到的,这个时间差就代表不同卫星到接收机的时间差,即距离差。在导航电文中,子帧1每30 s出现1次,而不同卫星信号到达接收机所需时间的差值最大只有20 ms。因此,很容易保证所观测的不同卫星的子帧1都是在同一时刻发送的。统计本地参考时间与所接收到的卫星星历子帧1的开始位置的时间间隔即可得到伪距信息,如图1所示为伪距测量的时间关系。
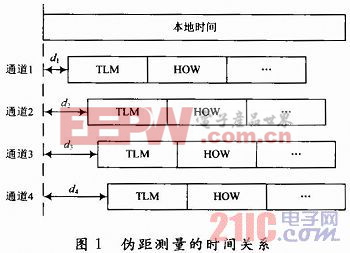
在GPS接收机内部存在两种时间统计方式,本地时间T和道时间Ti。本地时间可以选择任意一个时刻作为参考,之后便由本地晶振计数累加。通道时间由三部分组成:20 ms计数TD,1 ms计数TCA和C/A码相位计数TCAphasc。每个通道在接收到导航电文子帧1的TLM遥测字时刻,三个计数值同时清零,之后由跟踪得到的C/A码相位为步长累加,即通道时间Ti为:
Ti=TD/50+TCA/1 000+TCAphasc/(1 023×1 000)
在某一中断时刻,本地参考时间与GPS系统时间的差值即为时间偏移量tu,本地参考时问和各个通道时间的差值与光速乘积即为ρi,即:
ρi=(T-Ti)·c
2 系统方案设计
一般来说,在实时信号处理系统中,底层信号处理的特点是处理的数据量大,处理速度高,但运算结构相对比较简单,适于用FPGA进行硬件实现,这样能同时兼顾速度及灵活性。上层信号处理的特点是处理的数据量较少,但算法的控制结构复杂,适于用运算速度高,寻址方式灵活,通信机制丰富的DSP芯片来实现。
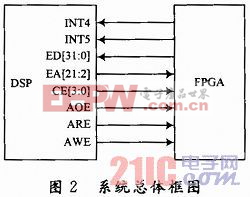
由于GPS接收机系统涉及到GPS信号捕获算法、载波跟踪算法、码跟踪算法、卫星位置解算,用户位置解算、以及大量的相关算法计算,综合算法复杂且运算量相当大,同时GPS接收机系统要求很高的定位精度和实时的动态性能,对系统的体积、功耗、稳定性等也都有较严格的要求。如果所有任务都由DSP来完成,不仅对DSP的压力很大,还有可能满足不了系统的实时性要求。为了协同DSP完成整个GPS接收机系统的工作,在该系统中采用一片DSP高速微处理器和FPGA大规模可编程阵列组合搭建了系统硬件平台,FPGA主要完成GPS信号的捕获、跟踪和解扩解调,以得到导航和测距信息;DSP芯片作为系统的主处理芯片,主要负责数据处理,以及对逻辑控制模块的通信与控制,而系统外围设备的控制与通信工作由FPGA完成。这样可以使整个系统的任务合理分配,DSP芯片能更专注于大量数据的处理,使信号处理的实时性得以保证。总体框图如2所示。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码