基于CAN总线和双传感器的仿人机器人运动控制系统研究
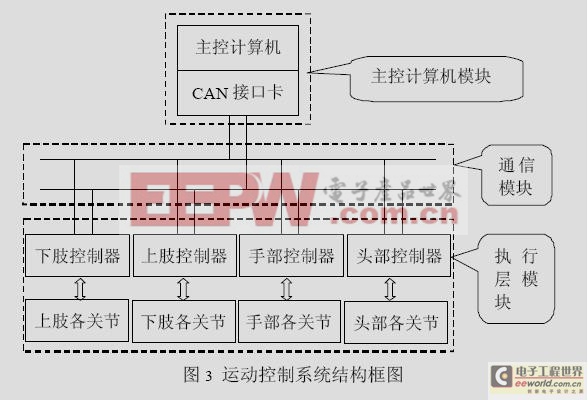
图3 运动控制系统结构框图
3 执行层模块
执行层处于整个控制系统的最底层,由不同类型的控制器组成,主要用来控制各运动关节轴系的具体执行过程。由于各运动关节电机的型号不同、承载的重量不同,对控制精度的要求也不同,我们分别为之设计了不同的运动控制器。
①开环DSP运动控制器
头部和上肢负载重量较轻,因此采用开环DSP运动控制器来对头部和上肢各关节进行控制。这些控制器不需要采样和反馈,直接接收主控计算机发来的控制命令,然后生成相应的执行命令发给各关节轴系,使之转到相应角度。
②开环MCU运动控制
器手部各个关节体积和质量都很小,故采用开环MCU运动控制器来进行控制。这些控制器采用MCS-51单片机作为处理器,可以直接嵌入到手掌内,它们接收主控计算机的控制命令,利用其IO引脚产生需要的多路脉冲控制信号,控制手部各关节的运动。
③闭环DSP运动控制器
腿部所有轴系均由直流减速驱动型电机构成,带零位检测、码盘和电位计反馈以及多维力/力矩传感器,结构复杂、控制难度大、精度要求也高,故采用闭环DSP运动控制器。这部分是整个控制系统的关键,也是我们研究的重点。
4控制系统流程
整个控制系统的具体流程为:系统开始运行并完成初始化工作;主控计算机根据规划和计算向底层控制器发送控制命令,底层控制器接收到命令后,结合各传感器反馈的信息,通过一定的控制算法生成相应的执行命令并发送给各关节执行轴系,同时把底层轴系的运行情况上传给主控计算机,主控计算机根据新的情况再产生新的命令发送给各控制器,如此反复。这事实上是两个闭环反馈过程,底层控制器通过传感器与各关节轴系之间进行小循环反馈,主控计算机通过各控制器与各关节轴系之间进行大回路反馈,这样可以使机器人具有更多的“智能”,更好的进行离线实时控制。
主控计算机每秒钟向底层控制器发送200组数据,底层控制器向主控计算机反馈同样数目的数据,而CAN总线的最大通信速率可以达到几千帧/秒,完全可以满足控制的要求。
四、控制器详细设计
控制下肢的闭环DSP 控制器是整个控制系统的核心部分,承担着整个机器人的负载重量,输出功率大,对控制的精度要求也高,因此它的性能直接关系到机器人运动的实现。我们专门为之设计了基于双位置传感器的闭环DSP控制器,其结构如图4 所示。
DSP主处理器选用的是TI公司的TMS320LF2407A芯片,它是TI 家族C2000 系列中的高档产品,非常适用于工业控制。它的两个事件管理器功能尤为强大,完全是为电机控制设计的,可利用多个PWM脉冲通道直接产生需要的PWM脉冲控制信号;其CAN总线模块可以直接与主控计算机进行通信而不需要增加CAN总线控制器;外部看门狗可以对控制器电压进行监控;外部存储器中存放着控制算法所需的必要参数。
控制器的双位置传感器由电压输出传感器和光电码盘传感器组成。其中,电压传感器把轴系的位置信息转换成电压信号,经过放大电路放大,再经过专门的A/D转换器转换成数字信号送入DSP主处理器。不用TMS320LF2407A自带的A/D转换器而使用专门的A/D转换芯片,这是为了提高转换的精度,因为TMS320LF2407A 的A/D转换器所能接受的最高转换电压只有3.3V,而经过功率放大后的电压远远超出了此范围,所以使用了专门的A/D转换芯片。这部分电路虽然增加了控制器的复杂程度,却可以大大提高转换精度,所以是十分值得的。
码盘传感器把轴系的位置信息转换成脉冲信号,经过光电隔离器件隔离后送入专用脉冲计数器,计数后的信息送入DSP主处理器。脉冲计数器选用当今流行的CPLD器件,其强大的功能对提高控制器的性能有很大的帮助,同时还可以作为译码电路为主处理器提供译码功能。主处理器通过对接收到的传感器信号进行分析和计算之后产生相应的PWM脉冲控制信号,经过光电隔离和功率放大后送给底层轴系控制轴系的运行。使用双传感器可以大大提高反馈的精度,两路信号可以同时考虑,也可以一路为主,另外一路提供补充和参考。
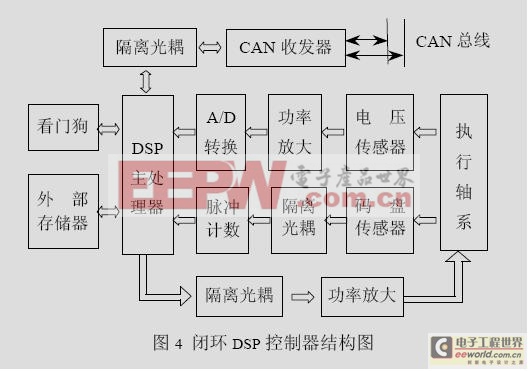
图4 闭环DSP控制器结构图
主处理器通过CAN总线与主控计算机进行通信,接收主控计算机的命令并把底层信息反馈给主控计算机,实现更高一级的反馈控制。主处理器通过CAN总线收发器连接到总线上,为提高精度,中间需要进行光电隔离。该控制器直接安装在仿人机器人的体内,每个控制器可以同时控制6 个关节轴系,整个下肢只需要两个控制器就可以实现其运动控制。
五、结论
我们在充分吸收当今相关学科高技术成果的基础上,设计出一套速度快、稳定性强、集成度高、结构灵活、使用方便的仿人机器人运动控制系统。整个运动控制系统可直接嵌入到机器人本体内,以便在实际运行中圆满地完成规定的控制任务。同时,该控制系统还有很强的扩展功能,可以方便地移植到其它类似的控制机构中去,是一种多功能通用型控制系统,具有广阔的应用前景。
1
2

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码