基于模糊神经混合系统的自适应控制方法及其应用
3 仿真实验
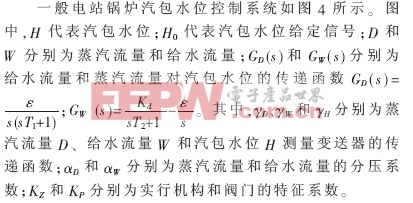
电站锅炉汽包水位间接的反应了锅炉负荷与给水平衡的关系,是锅炉运行的主要指标之一。水位过高,会破坏汽、水分离装置的正常工作,严重时会导致蒸汽带水增多,从而增加过热器管壁上和汽轮机叶上的结垢;水位过低时,则会破坏水循环,引起水冷壁的破坏。近年来锅炉参数的提高和容量的扩大,对给水系统提出了更高的要求。因此,迫切需要一种鲁棒性很好,算法相对简单的快捷控制方案。
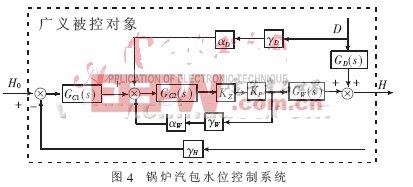
将图4框内的一个广义对象当一个整体去考虑,可以消除水流量和蒸汽对汽包水位的传递函数不稳定环节,克服自平衡特性。神经网络具有充分逼近任意复杂系统的能力,同时还能学习和适应不确定性的动态响应。为检验所提出的控制策略的有效性,对图4中的被
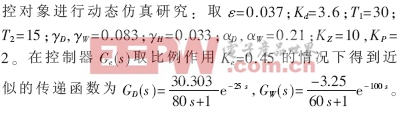
采用本文提出的基于模糊神经混合系统的自适应控制方法,其对比试验采用PID串联控制系统,PID调节器参数是在折中考虑系统的跟踪性、抗外扰能力和抗内扰能力的基础上,经过整定得到的,其外回路KP=1.5,Ki=0.005,内回路KP=0.95[7]。
图5所示为对象模型匹配情况下的输出响应图。图6为给水量信号H=0 mm时,在起始时刻加入蒸汽流量30 %外扰时输出响应曲线。
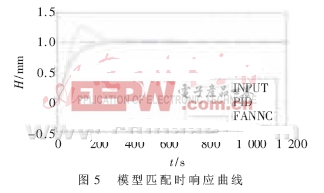
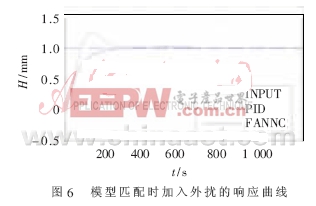
图7所示为对象时间为常数,增益常数和延迟时间均增大20%的输出响应曲线。图8在模型失配情况下,在给水流量信号H=0 mm时,加入蒸汽流量的30%外扰时输出响应曲线。
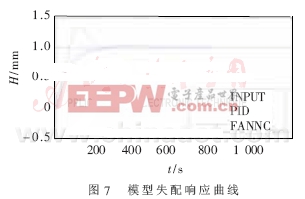
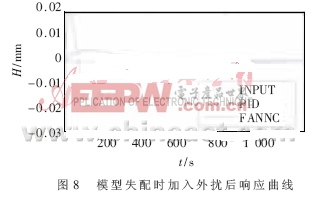
从图中可以看出,较之串级PID控制,FANNC控制具有良好的动态调节品质和较强的鲁棒性,实现了对系统的快速无超调控制。实验中将蒸汽流量扰动信号引入到神经网络中,实现了对系统的前馈补偿,以快速平稳消除蒸汽流量的扰动。鲁棒控制器FC的构造使系统具有良好的稳定性和鲁棒性,与常规PID控制相比,几乎没有超调量。即使在模型失配(参数增加或减少)的情况下仍然能取得满意的控制品质。仿真结果表明了该方案的有效性和优越性。
本文提出的这种基于模糊神经混合系统的自适应控制方法是针对工业系统中普遍存在的复杂非线性和时变不确定性特性提出的。该方法可以做到无须辨识被控对象的模型,即可进行NNC的在线设计;而且NNC的学习过程和系统的控制过程同时进行,不需要特定的教师信号,避免了离线训练通常存在的训练数据不足的问题。利用模糊推理机产生的分目标学习误差对神经网络进行训练,避免了采用直接反馈误差进行训练可能造成的饱和和过调整问题,并能有效抑制测量噪声的影响,提高系统的控制品质。仿真实验证明,该方法能有效处理工业系统中普遍存在的复杂非线性和时变不确定性等特性,为未知不确定非线性系统的智能控制提供了一条有效而可行的新途径。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码
