一种雷达防追尾预警系统设计

步骤2 模型条件滤波:
对应于模型Mj(k),以X 0j
(k - 1|k - 1),P0j(k - 1|k - 1)及Z(k)作为输入进行卡尔曼滤波。
卡尔曼预测方程:

预测误差协方差阵:

卡尔曼增益:
![]()
滤波方程为:

波误差方差阵:

步骤3 模型概率更新:
i = 1rΛj(k)cj_,而Λj(k)为观测Z(k)的似然函数:
其中:

步骤4 输出交互:
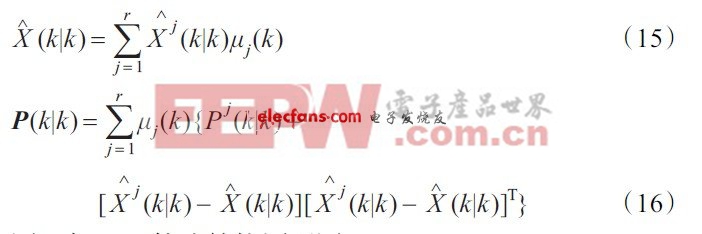
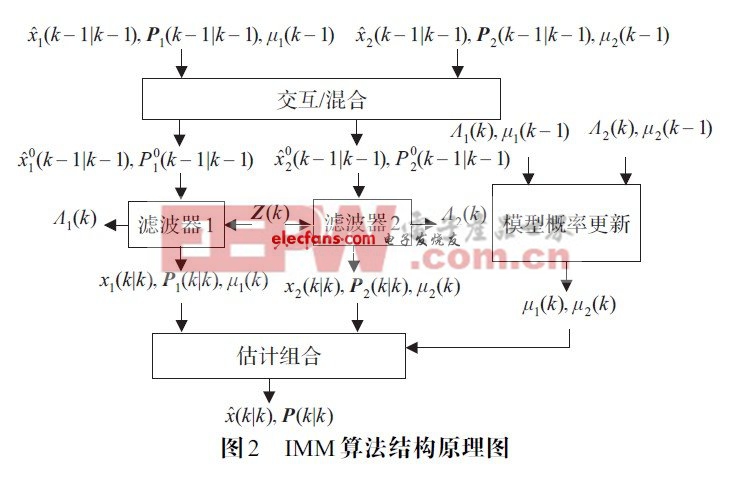
图2 为IMM算法结构原理图

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码