船载雷达回程误差分析及消隙设计
根据电流指令控制要求设计产生偏置电流指令信号的电路,简称为力矩偏置电路。利用两个电流环的负载电流指令提取Id1和Id2信号,通过偏置电路去控制偏置电流指令的形状,可以使偏置电路成为一种函数发生器,使偏置电流指令成为负载电流的函数。
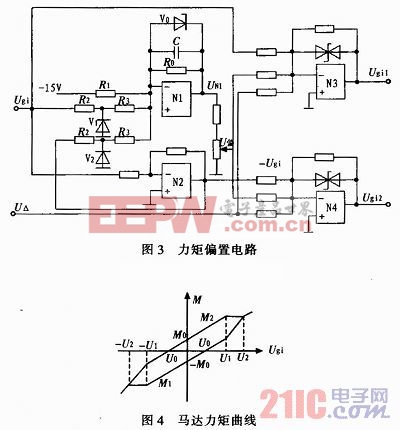
图3是力矩偏置电路图,Ugi为速度调节器输出的负载电流指令,U偏是偏置电流指令,U△是差速振荡抑制电流指令;N1为梯形函数发生器。调整电位器可以调整偏置力矩的大小。
3.2 消隙实现
如果不考虑抑制差速振荡的马达力矩,则两个马达的力矩M1和M2与负载电流指令的关系如图4所示。
图4中,Ugi为速度调节器输出的负载电流指令。
当Ugi=0时,M2=-M1=M0,M0称为偏置力矩值。
当Ugi由0正向增加不太大时,保持M1、M2反向,仍能消隙,此时由2#马达拖动负载和1#马达前进。
当Ugi正向增加到U0时,M1=0,1#马达在齿隙中游移。但2#马达仍拖动负载,其齿轮箱不会出现齿隙,负载不会游移。
当Ugi>U0时,1#马达穿过齿隙与2#马达共同推动负载,但M2>M1。
当Ugi≥U1时,偏置力矩开始减小。
当Ugi≥U2时,偏置力矩完全消隙,两台马达以相等的力矩推动负载。
可以看出,在一般工作情况下,负载至少和一个马达之间无齿隙,不会游移。但是,当力矩快速反向而且其值又比较大时,仍有可能产生两个马达同时穿过齿隙的情况,但这种情况在实际使用时并不多。
4 结束语
双马达电消隙系统应用于船载雷达,经实践检验效果良好。采用雷达跟踪信标球方式进行测角精度统计,其结果如表1所示。
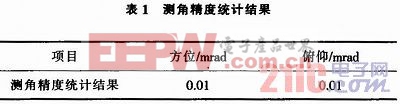
由上表可以看出,方位和俯仰测角随机误差满足0.2 mrad的指标要求,大大提高了船载雷达的测量精度。
在精密雷达天线驱动系统中,双马达或多马达驱动除了能实现电消隙、提高测角精度之外,在传递同样力矩的前提下,双马达驱动比单马达驱动所用的齿轮箱体积小,重量轻,易于加工制造;也就是说,在齿轮箱总体积相同的情况下,双马达驱动能提高传动链的刚度。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码