基于Simulink的滑模软起动器仿真研究
2 软起动控制方式
在软起动的仿真系统中,软起动模块中有四种软起动方式的子模块,分别是斜坡软起动、限流软起动、分级变频软起动和转矩控制软起动子模块。四种软起动是通过对晶闸管的导通角(alpha)不同计算方法,产生相适应的四种软起动方式的六脉冲,达到各自的软起动的目的。
2.1 斜坡软起动
斜坡式软起动是从初始角开始以斜坡的方式增加电动机上的电压直到额定电压的软起动方式。斜坡软起动的初始角可以根据情况进行设置,起动时间也可以由用户调节。图6是斜坡软启动alpha角计算的子模块。“uini”是软起动的初始角,“uincr”是软起动的斜坡增长的斜率控制。

斜坡电压软起动是一种常见软起动方式,这种起动方式的起动时间比直接起动长,起动电流比直接起动小,起动转矩不高,容易实现。
2.2 限流起动
限流起动是在电动机的起动过程中限制其起动电流不超过某一设定值。这种起动方法主要用在轻载起动的降压起动,其输出电压从零开始迅速增长,直到其输出电流达到预先设定的电流限制,然后在保持输出电流小于电流设定值的条件下逐渐升高电压,直到额定电压,从而使电动机转速逐渐升高,直到额定转速。图7是基于Matlab/Simulink搭建的限流软启动alpha计算子模块,alpha计算是在电流的闭环控制使用模糊控制器计算alpha角,调节电机两端电压。
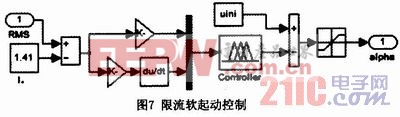
限流软起动采用电流反馈的闭环模糊控制调节,可以快速、准确地触发晶闸管,避免大电流的冲击,很好地限制起动电流。
2.3 转矩控制起动
转矩控制起动是控制电动机的起动转矩由小到大线性上升,并根据起动转矩变化计算晶闸管的导通角进而控制电机的输入电压,使电机的转矩满足电动机使用要求。图8是转矩控制软起动alpha角计算子模块。

转矩控制软起动的优点是起动平滑、柔性好,对拖动系统有利,同时减少对电网的冲击,是最优的负载起动方式。
2.4 分级变频软起动
分级变频(离散频率法)就是使传统软起动器输出电压的频率从一个较低的值开始,分级上升,最后达到50Hz。分级变频虽然可以实现变频,但不能使频率连续地变化,只能使频率分级变化,而且各级频率都是50Hz的n分之一(即50Hz的分频),实现较高起动转矩。图9是分级变频软起动导通角alpha的计算子模块。在低频起动过程中,为保持电机的主磁通不变,要相应地降低定子电压,通过计算得到电机在F/2、F/4、F/5、F/7的导通角alpha的大小,在频率达到50Hz后,导通角缓慢减小到0,使电动机上的电压达到额定电压,完成软起动。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码