基于USB接口的激光陀螺惯导系统数据通讯
在程序执行的初始时刻,设置指针sptr等于dptr。当IN端点FIFO满时,DSP将数据按指针sptr存入圆形缓冲区,sptr随之递增,而dptr保持不变。当IN端点FIFO空时,DSP仍将数据按指针sptr存入圆形缓冲区,sptr随之加1。但此时将从dptr指针处发送两帧数据到FIFO中,这种dptr追赶sptr的机制,将保证圆形缓冲区不出现溢出现象:即不会出现sptr超过dptr一圈以上的情况。
1.4 通讯系统软件整体设计
遵循软件设计中尽量较少使用中断的原则,这里只使用1个4 K中断,其他三路信号都采用查询方式,中断分配如图5所示。
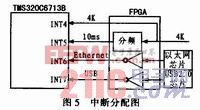
图6为主程序流程。USB从管道0接收PC机发来的命令,命令写入EP2端点中,此时在INT7管脚上产生USB中断。DSP通过查询INT7中断,将EP2中的命令及数据读出,对命令进行解析,并执行相应的指令工作。非周期指令执行完后,将接收数据写入EP4端点,PC机从管道1中将数据取走;周期指令执行完后,将接收数据写入EP6端点,PC机从管道2中将数据取走。
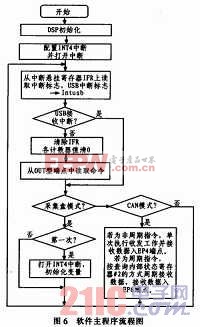
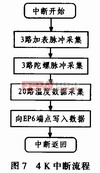
图7中的4 K中断流程主要完成陀螺和加速度计脉冲及温度数据的采集工作,并向EP6端点写入。
2 通讯效果测试
将激光陀螺惯性导航系统固定于振动模拟台,按照军用环境的要求进行了近千小时的振动实验。实验过程中导航计算机高速采集惯性仪表在振动环境下的输出数据,并通过USB接口传输给PC机并保存下来。
当圆形缓冲区的两个指针各自达到最大位置后将从0地址重新开始,长时间双向通讯的测试结果表明:将采用上述方法后的输出数据与串口输出数据进行比对,发现无丢帧现象产生。在导航计算机上进行离线仿真以确定和分离各项误差系数,通过实时误差补偿减小了部分误差,从而提高了系统在强振动下的精度。当然,PC机在与导航计算机的数据传输过程中,建议尽量减少运行的任务数量,特别是占用CPU时间较多的任务,如杀毒、音频视频解码等。
3 结论
本文将基于CY7C68013A的USB接口技术应用于惯导系统数据通信,创新性的设立圆形缓冲区解决了USB接口数据传输过程中的丢帧问题。近千小时测试结果表明:上述USB接口通讯装置可实现导航计算机和PC机间高速实时数据传输且期间无丢帧现象发生,表明该装置具有良好的稳定性与可靠性。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码