基于模糊PID控制算法的恒温石英晶体振荡器
3 模糊PID控制器的控制设计
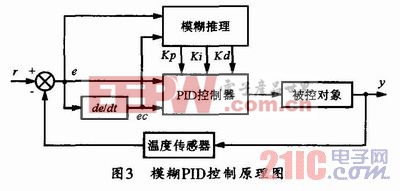
模糊PID控制器以偏差E和偏差变化率Ec作为输入,可以满足不同时刻的E和Ec对PID参数自整定的要求,利用模糊规则在线对PID参数进行修改,便构成了模糊自整定PID控制器,其结构如图3所示。
3.1 模糊控制规则的设计
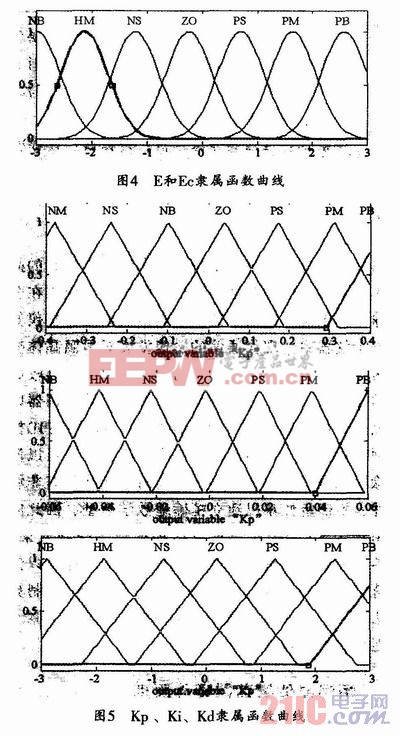
将偏差E和偏差变化率Ec作为模糊控制器的输入,PID控制器的三个参数Kp、Ki、Kd作为输出。根据项目实际情况,E和Ec模糊子集为{负大、负中、负小、零、正小、正中、正大},记为{NB、NM、NS、ZO、PS、PM、PB},将E和Ec量化到(-3,3)的区域内。同时Kp、Ki、Kd的模糊子集{负大、负中、负小、零、正小、正中、正大},记为{NB、NM、NS、ZO、PS、PM、PB},分别量化到(-0.4 0.4)(-0.06 0.06)(-3 3)区域内,输入采用高斯型隶属度函数,输出采用三角形隶属度函数,其隶属函数如图4、图5所示。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码