微机械陀螺的闭环驱动电路的设计与实现
闭环驱动电路实现
我们重点分析C-V转换电路和AGC反馈回路。
C-V转换电路
本文中研究的微机械陀螺包括驱动模态的两个差分检测电极和检测模态的两个差分检测电极。这两对电极敏感的都是电容的变化,C-V转换电路主要是将微弱的电容变化量转变成相应的电压信号量,其特性对陀螺的驱动和检测精度都有很大的影响,特别对硅微陀螺的检测电路至关重要。 图3为C-V转换电路原理图,载波信号V连接到差动电容的公共极板,电容的另外两端分别接两个电荷放大器。从图中看,C1、C2右端为驱动检测极板,左端为公共极板。
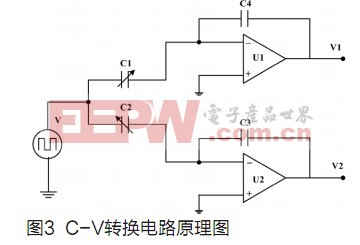
当驱动模态振动时有C1=C0+ΔC,C2=C0-ΔC其中C0 是静止时极板间电容, 是变化电容。同时,在电路中使C3-C4=Cf。则由计算可知:
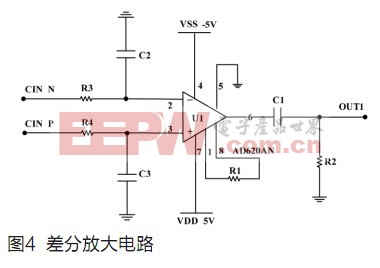
V1、V2分别接差分放大器的两端,电路如图4。
得到:
其中,是差分放大器的共模增益。
至此,驱动极板间电容变化量被转换为电压信号,驱动极板运动状态被转换为电压输出,完成了C-V转换。AD620AN差分增益: ,取RG=10kΩ,可得G=5.94。这对示波器信号显示是不够的,所以后面还需接放大器。
,取RG=10kΩ,可得G=5.94。这对示波器信号显示是不够的,所以后面还需接放大器。
在该检测电路前一级放大器中,输入端为虚地,所以差动电容到放大器输入端的分布电容对检测影响很小[3]。而差分放大电路能抑制共同噪声,并且抑制了零点漂移。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码