电子束焊机用高压电源中的PLC控制系统的设计
控制电路由PWM控制电路、高压反馈环节和PID调节器组成。具体原理图如图2所示。PWM电路主要控制逆变器的软启动、提供40kHz方波脉冲和隔离驱动、过流保护等。高压反馈环节有高压精密分压器、高压隔离电路和D/A转换器组成。该环节把直流高压信号转变成标准的低电平信号,再通过D/A转换器转换成数字信号送入PLC,作为PID运算的反馈量。给定环节由A/D转换器、数据设定单元和外接模拟电路组成,分手动和自动两种情况。手动时由模拟电位器给出的模拟信号经A/D转换器后变成数字量作为PID的给定;自动时,给定值由PLC设定单元直接设定数字作为PID的给定。同时PLC内部设计了梯度给定程序,使得PID输出为一斜波输出,作为高压电源的软启动。PID环节由PLC和D/A模块组成,PID运算由PLC的PID指令完成,包括采样时间、比例常数、微分常数、积分常数、滤波常数的设定等。PID运算后的数字经D/A转换成模拟信号作为直流调压模块的控制电压以调节其直流输出。直流高压稳定和调节的工作原理是,当由于外部原因使得输出电压下降时,经反馈环节和PID运算后使控制电压提高,从而提高调压模块的输出电压,使逆变器的输出电压、高压变压器的输出电压和直流输出电压提高以达到直流高压的稳定和调节。
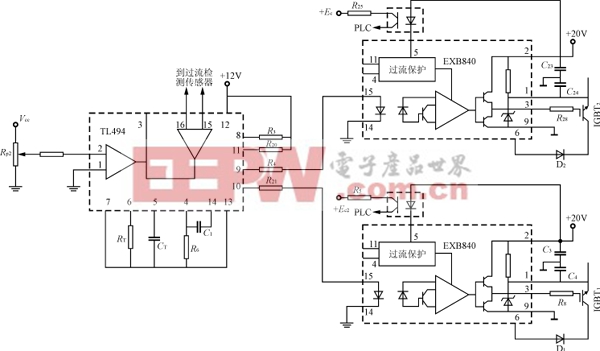
图2 电源的PWM及驱动控制原理图
4 软件设计
高压控制系统软件流程图如图3所示。控制系统软件由以下部分组成。
初始化程序 对控制系统的参数进行设定。
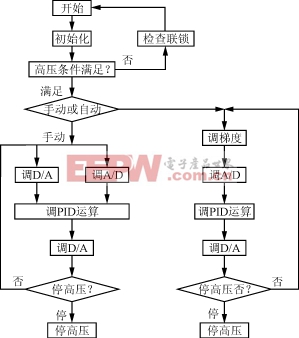
图3 控制系统软件流程图
梯度给定程序 产生PID给定信号,利用PLC的加法指令和特殊继电器M8021来实现上升梯度,使得给定为斜波函数。下降梯度则由减法指令和M8021形成。
A/D程序 高压反馈信号和手动给定信号的模数转换,作为PID运算的反馈量。
D/A程序 把PID的运算结果实时地转化为模拟量,用以控制可控调压模块的输出。
PID运算程序 由PLC的PID运算指令完成,根据系统的实际要求设定采样时间、比例常数、微分常数、积分常数、滤波常数等。
END 结束程序
5 保护电路
电子束焊机在工作时,电子枪内的打火、电源操作及其它外部原因会在电源内部产生过电压或过电流以致损坏电源或IGBT、集成电路及工件,采取保护电路是抑制过电压或过电流的有效措施。电源设置过压保护、梯度上升及下降电路和过流保护电路。过流保护采用以下三重保护。
1)EXB840电路本身的过流保护检测功能,即在IGBT过流时,IGBT驱动模块的脚6会检测到过流信号而直接封锁输出脉冲,关断IGBT,同时EXB840的脚4经过外接电路输出信号给PLC,PLC经过程序运算后,一方面发出过流信号指示,另一方面给晶闸管移相控制电路提供封锁脉冲信号,关断晶闸管主电路。
2)利用TL494的内部放大器的脚15、16外接电流隔离传感器,当检测到的电流信号超过设定值时,TL494封锁输出脉冲,从而实现对IGBT的关断。
3)高压侧电子束流过流保护,当出现过电流时,束流取样信号反馈到控制电路,控制电路发出过流信号给PLC,PLC分别发出关断主电路和过流显示信号,从而实现过流保护。
电源还设置了过压保护电路,能有效地对电源的过电压进行保护,在高压电源的内部还加装了限流电阻及保护电阻,能有效地限制过电流和过电压。为了克服开机时市电对电源的冲击,通过PLC内部程序设置了软启动斜坡函数,经D/A模块运算后作为PI调节器的给定,实现电源的软启动。
6 结语
电子束焊机用高压电源的控制系统采用PLC技术后,系统工作可靠性提高,电路结构简单,有利于电子束焊接设备的焊接工艺调整和方便设备的维修和调试。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码