I2C总线通信技术在球形机器人双DSP控制系统中的应用
I2C总线通信的软件设计
双DSP系统通信思路
双机通信软件的设计问题涉及到DSP C6000(DM6437)和DSP C2000(F28015)两部分的软件设计。设计双DSP系统的初期设想是,用DM6437来接收图像信息并进行处理,将最终得到的处理结果传送给F28015,F28015根据得到的处理结果来执行相应的电机控制及其他子任务。可以看到,在这个通信过程中,DM6437是主机,负责发送数据,而F28015是从机,负责接收数据并执行相应控制命令。但是应注意到,在I2C总线通信中,主从机的地位并不是一直不变,可以根据需要随时重新设定主机和从机。由于嵌入式系统的人机界面一般不大友好,想要观察实验结果往往需要打印数据或者通过LED等指示装置来体现。在本文中,考虑到DM6437芯片极其对应的软件开发系统CCS V3.3支持在线打印功能,因此,为了简化设计,便于观察,双DSP的I2C通信可以这样考虑:先让DM6437发送一个数据到I2C总线上,并打印这个发送数据的相关信息,然后在F28015这一端接收数据,如果接收到DM6437传来的数据,就将数据进行一定的变换(例如乘以一个倍数),然后再通过I2C总线将变换后的数据发送给DM6437。DM6437接收返回的数据并打印返回数据的相关信息。通过观察打印信息,就可以很清楚地了解到I2C通信的实时效果。
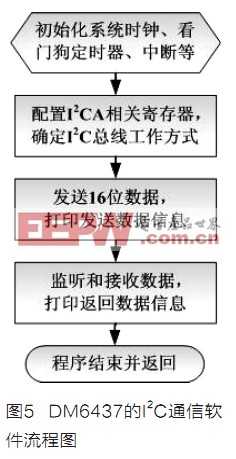
DM6437的I2C通信软件
根据所介绍的基本思路,可以设计出DM6437的I2C通信软件的流程图(图5)。
F28015的I2C通信软件
根据所介绍的基本思路,可以设计出F28015的I2C通信软件的流程图(图6)。


加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码
