基于微处理器的紧耦合组合导航系统设计
3 紧耦合GPS /惯导组合系统硬件设计
GPS /惯导紧耦合系统硬件可以分为五个部分,其结构如图3所示。
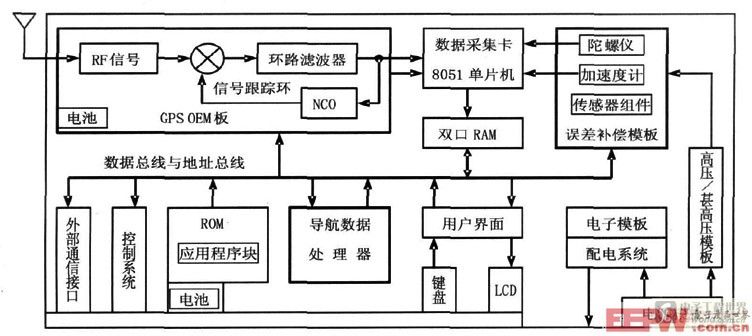
图3 紧耦合GPS /S INS系统硬件组织设计图
( 1)数据采集部分, 由GPS接收天线、GPS OEM板、陀螺仪、加速度计、数据采集卡和双口RAM 组成。其中, 数据采集卡应具有不同的采样频率, 能够同时采集模拟信号和数字信号, 由8051单片机加上一些外围芯片组成的数据采集卡;也可以使用专用的GPS+ 惯导系统数据采集卡, 如TMS320C25数据采集卡。在GPS、惯导系统与导航数据处理器( CPU )之间的数据传输可以利用双口RAM, 以实现数据的快速存取。
( 2)导航数据处理部分, 采用单片机(如80196单片机或8086 /8087单片机) , 通过总线从ROM 中将应用程序调入导航处理器( CPU )进行数据处理,处理结果再次放回总线, 对惯性测量器件进行误差补偿、辅助GPS OEM 板的信号跟踪环路、显示导航信息、传输到控制系统和外部通信接口等。此外, 还负责系统部件的协调与管理, 维护系统的正常运行。
( 3)用户界面部分是人机对话的工作平台, 由液晶显示器和输入键盘组成, 显示导航信息, 对导航系统进行人工干预。
( 4)电源部分, 由电源模板、电子模板、高压甚高压模板和配电系统构成, 为GPS OEM 板、惯导系统、数据采集卡、以及导航数据处理器等提供各种标准电源支持。
( 5)通信接口部分包括系统内部元件接口通信和系统与外部接口通信, 前者采用M IL STD1553总线;后者将外部测量数据传入系统, 如气压测高数据、雷达测量数据等, 以对系统进行校正或多系统组合导航, 也可以将系统内部数据传输到其它设备。
4 紧耦合GPS /惯导组合系统软件设计
GPS /惯导组合导航系统设备包括8 个软件功能模块, 各个功能模块之间的连接如图4所示:
( 1)系统启动与自检模块, 负责系统设备开启,检测设备部件的运行状况, 对异常情况及时报警, 提示工作人员给予相应的指示操作。
( 2)系统管理模块, 负责系统设备的协调、管理、数据存储与清理工作。
( 3)系统初始化模块, 使用GPS 进行快速定位和姿态测定, 实现惯导系统的初始对准。
( 4)数字信号处理模块, 负责GPS接收机的数字信号处理。
( 5)数据采集模块, 负责GPS、惯导系统基本观测量的数据提取, A /D转换等工作。
( 6)数据传输模块, 将GPS、惯导基本观测量的数据传输到CPU, 进行导航数据处理, 将最终导航信息传输到导航显示设备和控制系统等。
( 7)导航数据处理模块, 负责各种导航算法的实现。
( 8)用户界面模块, 提供用户界面, 具有显示导航信息、数据查询和错误提示等功能。
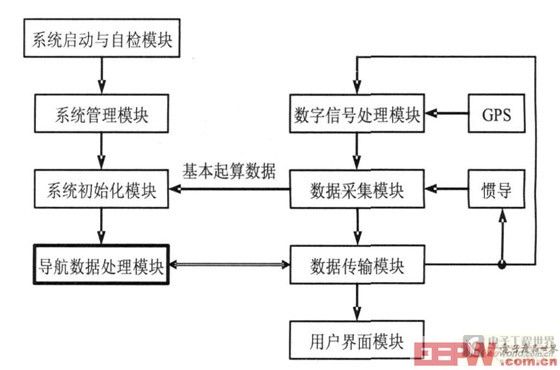
图4 GPS /惯导组合导航系统软件模块化实现框图
5 结束语
基于微处理器强大的计算和通信能力, 解决对主被动导航的多传感器数据融合问题, 克服了GPS导航机动性能差、卫星信号失锁、惯导系统误差随时间漂移的主要缺点, 取长补短。使组合导航系统既增大了等效噪声带宽, 保证在高动态环境下对卫星信号的稳定跟踪, 又提高了接收机的抗干扰性能、系统可靠性能和容错性能, 从而输出平滑连续的导航信息。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码