智能救援机器人的设计
1.2.3 超声波测距电路
由于超声波执行性强、能量消耗慢、在介质中传播距离较远的特点。我们采用DIP-ME007超声波测距模块完成高度的测量功能,其电路板如图4所示。DIP-ME007超声波测距模块能比较迅速、方便地测出桥底部距测距模块之间的距离,此模块共有五个引脚VCC、tring、echo、out、GND。DIP-ME007超声波测距模块输出为pwm方式,VCC、GND接好后向tring发一个10 s以上的高电平,就可以在接收口echo等待高电平输出。单片机采用跳变沿触发,触发后即开始计时。当电平变低后即开始读定时器,此时的值即为此次测距所用的时间。根据S=Ct/2即可得出所测得的距离。如此周期性测量即可实现移动测距。单片机内部自动将测得数据保存并与上一次测距结果比较,保留最大值,当连续五次未测得大于前一次的数据时停止检测并记录最大值。当再次检测到黑线即已成功过桥,是时单片机控制显示模块将测得的最大值在液晶屏上显示出来。
1.3 控制器电路
由于主控制器的任务较多,电路要求引脚较多,且显示器的控制程序较为复杂,我们单独配备了一个同样的单片机作为主控制器的辅助部分,通过它来分担主控制器的工作,来完成显示部分的工作。其中主控制器与其它模块的连接如图5所示。
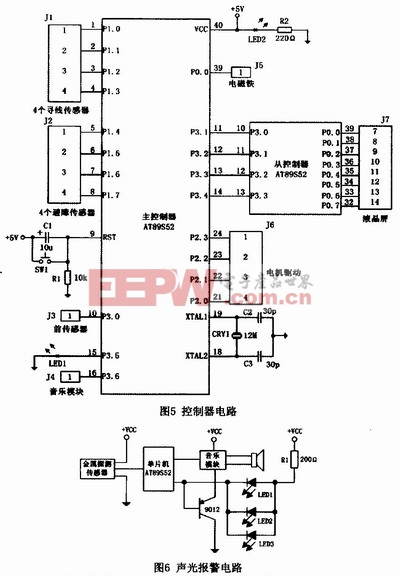
1.4 声光报警电路
声光报警模块主要应用于搜救报警电路中,同时为进一步扩展应用,我们在控制其开关的同时引入另一条信号线实现了对声音的控制。在搜救过程和平安到达安置区时经采用不同频率和音色的声音给出表示。寻找硬币我们采用金属探测传感器,当发现金属时,其信号线上电平从低电平变为高电平,触发单片机中断,在单片机的控制下机器人停止运动,启动音乐发生模块并点亮LED进行声光报警,具体实现电路如图6所示。
关键词: 救援机器人

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码