激光扫描车身坐标测量数据采集系统的设计

2.1 PIN数字脉冲信号预处理
首先以霍尔传感器输出波形为粗定位(波形1),从PIN输出的数字脉冲信号(波形2)中提取出采样周期定位波形,然后以此定位波形为基础定位出数据采样周期,在整个数据采样周期内对数字脉冲信号进行计数填充。采样周期定位脉冲(波形3)的下降沿是以PIN输出信号的定位脉冲的下降沿来定位的,其上升沿是以霍尔传感器输出脉冲的上升沿来定位的。提取出来的采样周期定位波形如图3中波形3所示。

2.2 采样数据周期产生电路
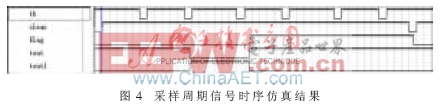
由于扫描器在不停地旋转,为了保证AVR获得正确的扫描数据,采样数据应该是一个完整周期内的数据,因此必须严格控制采样周期的完整性。为此设计了由AVR输出信号控制的采样周期产生电路。此电路以采样周期定位脉冲和AVR控制信号为输入,采样周期信号和采样周期终止信号为输出。在QUARTUSII9.0中进行仿真之后的波形如图4所示,图中tb为采样周期定位脉冲输入,clear为AVR输出的控制使能信号,tout1为产生的采样周期信号,flag为采样周期结束信号。
2.3 CPLD对FIFO芯片的直接控制
CPLD的主要作用是将数字脉冲信号计数填充后,在控制信号使能控制下将数据写入FIFO芯片中,因而CPLD中设计了对FIFO进行直接控制的功能模块,包括FIFO清空和写入。
2.3.1 FIFO数据清空
当FIFO中数据满时或AVR启动数据采集周期时都要先将FIFO中的数据清零,以防止FIFO溢出造成数据丢失或采集到错误的数据。针对FIFO清零时序,设计了由AVR控制的清零电路模块。执行清零FIFO命令时,首先向CPLD中写入清零信号MR电平拉低命令,命令字为0xF0;然后向CPLD中写入清零信号MR电平拉高命令,命令字为0x0F(任何非0xF0均可)。由于AVR单片机的时钟脉冲为8 MHz,因而这一过程必定能够满足清零脉冲的持续时间要求,FIFO即被清空。
2.3.2 单路FIFO数据写入
光电二极管接收的信号经前置放大及整形后频率比较高,由于系统一共有4路信号,AVR来不及直接去读取每个跳变沿的计数值,因而通过FIFO暂时缓存,待采样周期过后,AVR再从FIFO中读出计数值。要把计数值写入FIFO中,必须有正确的写信号,CY7C433对读写信号的时序有要求,写信号脉宽tPW≥15 ns,数据建立时间tSD≥8 ns,数据保持时间tHD无最小值要求。据此本文设计了图5所示的FIFO数据写信号产生电路,这一电路实质上是一个跳沿提取电路。输入的数字脉冲信号首先经过三个触发器延时三个时钟周期,之后对原信号进行异或,这样在信号的每个跳沿到来时便能产生一个3个时钟脉冲宽度的低电平脉冲。当CPLD时钟选为40 MHz时,此低电平脉冲的脉宽为75 ns,足以满足FIFO对写信号的要求。
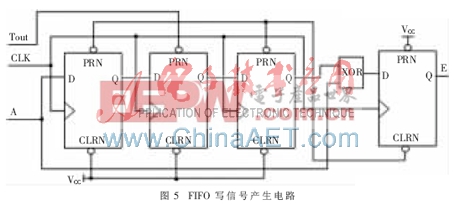
在此低电平写信号产生后还要经过一级触发器进行时钟同步,以避免CPLD设计中经常出现的竞争与冒险问题[5],同时将其上升沿同步于时钟脉冲的下降沿,正好满足FIFO写入时序中对数据建立时间的要求。
2.3.3 4路FIFO数据处理
在整个系统中共有4个激光扫描传感器,即会产生4路信号,且每路信号都会生成独立的FIFO写信号,因而共产生4路写信号。当4路写信号中有2路或多路信号同时到来时,写入FIFO中的数据会产生紊乱,而造成数据写入错误或数据丢失。因此,设计了一个多路写信号处理电路,当只有某一路信号中有写信号产生时,写信号处理电路中产生一个与之对应的写信号脉冲;当某两路或多路信号中有写信号产生时,只产生一个与之对应的写信号脉冲。为了避免数据丢失,为数据加上4位的数据来源标志位,当多路信号同时到达时,对应于有写信号产生的标志位置“1”。多路写信号处理电路如图6所示。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码