模糊滑模控制在跷跷板系统中的应用研究
表1 模糊控制规则表
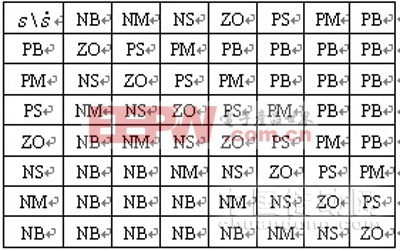
表中所有的控制规则是根据满足 ![]() 这个达到滑模的充要条件所设计的[8],所以设计的模糊滑模控制系统是稳定的。
这个达到滑模的充要条件所设计的[8],所以设计的模糊滑模控制系统是稳定的。
4 仿真研究
定义S ,![]() , 其论域分别为
, 其论域分别为![]()
,![]() ,
,![]() ,模糊化变量均选择正态分布隶属函数。
,模糊化变量均选择正态分布隶属函数。
(1)式中取![]() 。仿真结果如图2~5所示。
。仿真结果如图2~5所示。
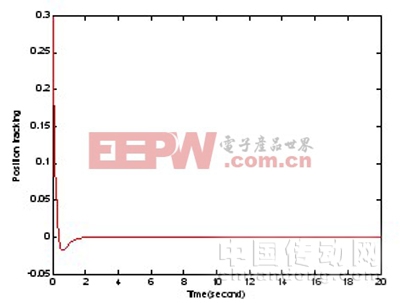
图2 小车位置随时间变化曲线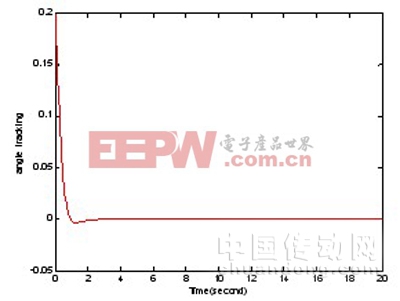
图3 杠杆角度随时间变化曲线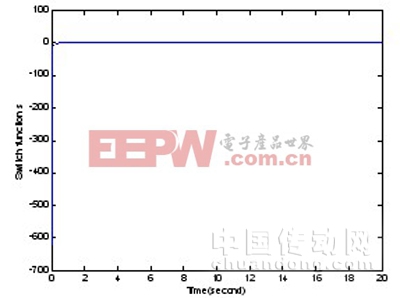
图4 切换函数对时间变化曲线 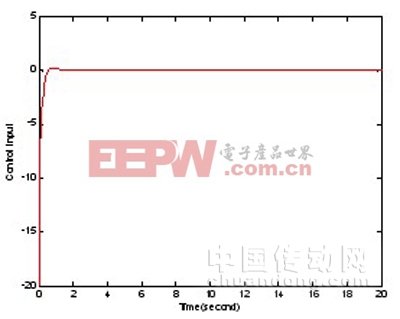
图5 控制律随时间变化曲线
由以上仿真结果可以看出,利用本文方案设计的控制器大大加快了系统的响应速度,且能有效地减小系统的最大偏差,系统的抖振现象也基本可以消除。
5结论
本文介绍了跷跷板系统的工作原理,建立了跷跷板系统的数学模型。针对常规滑模控制中存在的抖振现象,将模糊滑模控制方法引入跷跷板控制系统中,通过仿真可以看出,将模糊滑模控制应用于具有强耦合、非线性特性的跷跷板系统是切实可行的,而且使用滑模模糊控制算法设计出来的控制器具有很强的鲁棒性。
参考文献
[1] 蔡自兴.智能控制基础与应用[M].北京:国防工业出版社,1998.
[2] Chia-Ju Wu.Quasi Time-Optimal PID Control of Multivariable Systems:A Seesaw Example[J] Journal of the Chinese Institute of Engineers,Vol.22, No.5,pp.617-625(1999)
[3] Lon-Chen Hung, Hung-Yuan Chung .Decoupled Control Using Neural Network-based Sliding-mode Controller for Nonlinear Systems[J] .Expert Systems with Applications 32 (2007) 1168C1182
[4] Jeng-HannLI, Tzuu-Hseng S. Li* and Ting-Han Ou.Design and Implementation of Fuzzy Sliding-Mode Controller for a Wedge Balancing System[J]. Journal of Intelligent and Robotic Systems 37: 285C306, 2003.
[5] Chun-Hsien Tsai, Hung-Yuan Chung. Neuro-Sliding Mode Control With Its Applications to Seesaw Systems. IEEE Transactions on Nural Networks, vol 5, No. 1, Jaunary 2004
[6] Wincon User Guide[M].522-530.2003
[7] 刘金琨. 滑模变结构控制Matlab仿真[M].北京:清华大学出版社,2005:100-120.
[8] 刘金琨.滑模变结构控制MATLAB仿真[M].北京,清华大学出版社,2005.

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码
