第四届智能车竞赛技术报告
系统总体方案的设计
竞赛规则规定,智能车系统采用飞思卡尔的16 位微控制器MC9S12XS128 单片机作为核心控制单元用于智能车系统的控制。在选定智能车系统采用光电传感器方案后,赛车的位置信号由车体前方的光电传感器采集,经XS12 MCU 的I/O 口处理后,用于赛车的运动控制决策,同时内部Pulse-Width 模块发出PWM 波,驱动直流电机对智能车进行加速和减速控制,以及多个伺服电机对赛车各个部位的转向进行控制,使赛车在赛道上能够自主行驶,并以最短的时间最快的速度跑完全程。为了对赛车的速度进行精确的控制,在智能车后轴上安装光电编码器,采集车轮转速的脉冲信号,经MCU 捕获后进行模糊PID 自动控制,完成智能车速度的闭环控制。此外,还增加了键盘作为输入输出设备,用于智能车的角度和方位控制。系统总体方框图如图1。
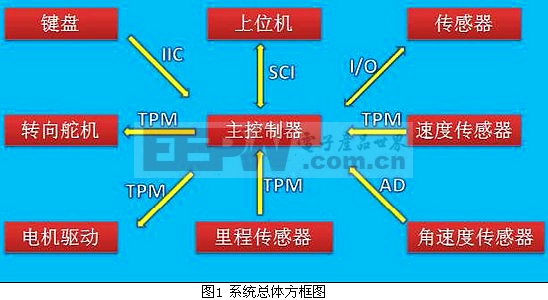
根据以上系统方案设计,赛车共包括七大模块:MC9S12XS128 主控模块、传感器模块、电源模块、电机驱动模块、速度检测模块、辅助调试模块。各模块的作用如下。
MC9S12XS128 主控模块,作为整个智能车的“大脑”,将采集光电传感器、光电编码器等传感器的信号,根据控制算法做出控制决策,驱动直流电机和伺服电机完成对智能车的控制。
传感器模块,是智能车的“眼睛”,可以通过一定的前瞻性,提前感知前方的赛道信息,为智能车的“大脑”做出决策提供必要的依据和充足的反应时间。
电源模块,为整个系统提供合适而又稳定的电源。
电机驱动模块,驱动直流电机和伺服电机完成智能车的加减速控制和转向控制。
速度检测模块,检测反馈智能车后轮的转速,用于速度的闭环控制。
辅助调试模块主要用于智能车系统的功能调试、赛车状态监控等方面。
智能车传感器模块设计
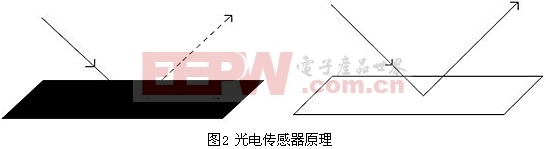
在确定智能车总体方案时,我们选择光电传感器的方案。为了获得更大前瞻距离,为控制系统后续处理赢得更多的时间,在从众多光电传感器中选择了大前瞻的激光传感器,前瞻距离可以达到普通光电传感器的数倍甚至十几倍,完全满足竞赛的要求。
关键词: 飞思卡尔 智能车 MCU 光电传感器 201008

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码