MPC07控制卡在运动控制系统中的应用
程序执行时,首先对控制卡进行自动检测和初始化,在程序界面中可以设置的参数包括:小车初始位置、初速度、最高速度、加速度、移动距离等,参数设置不满足要求时,还需要重新设置,只有满足要求后,才能开始运行程序。运动过程中可进行人工干预,人工干预后小车可立即制动也可光滑制动,如不需要干预,小车按照设置运动到指定位置。
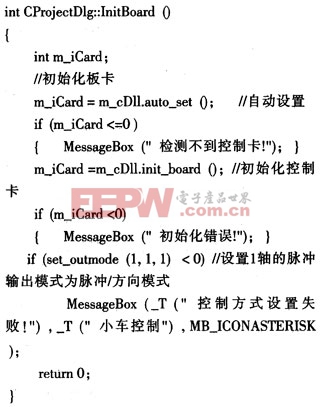
(1)初始化控制卡
首先定义DLL运动控制函数库变量:CLoadDll m_cDll,初始化函数为InitBoard (),其执行代码如下:
(2)运动实现
运动小车在点位运动方式下可进行常速或快速运动,软件通过对设定的移动距离与小车当前位置的比较来确定小车的运动方向,而后系统根据用户设定的运动参数进行相应的运动,其部分实现代码如下:

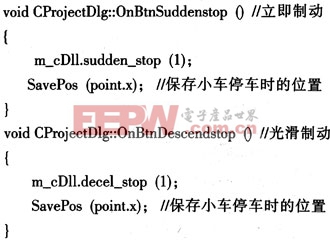
(3)制动
小车在运动过程中可采取立即制动和光滑制动两种制动方式,代码如下:
此外,程序运行时为了提高程序控制的精度,必须补偿实时显示用取得cpu的时间,也就是程序中的误差补偿部分。通过编译程序显示小车的运动控制界面如图3所示。

3 结束语
本文以基于PCI总线的MPC07控制卡为开发平台,利用VC++结合MPC07控制卡的运动控制函数库编写了面向对象的系统控制程序,通过MPC07卡对步进电机进行精确运动控制,从而实现了运动系统中小车的精确调速和定位,解决了运动控制系统中控制精度低的问题。应用结果表明,MPC07控制卡具有开发简单、运动可靠和控制方便等特点,能出色的完成运动控制的各个细节。
1
2

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码