一种改进的多传感器加权融合算法
4.由每个传感器的方差并根据公式(11),可以计算出融合权重ai,将上一步骤中的经过加权的各个传感器的状态估计值进行融合,根据公式(12),计算出融合值。
从以上运算流程中可以看出,对于每个传感器只需在其方差最小的情况下,就可计算出各自的最优比例权重。然后再根据它们的固定方差,计算出融合权重。
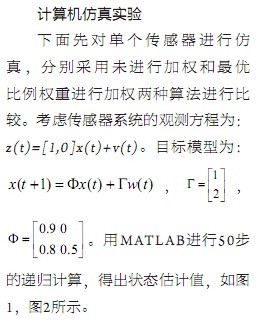
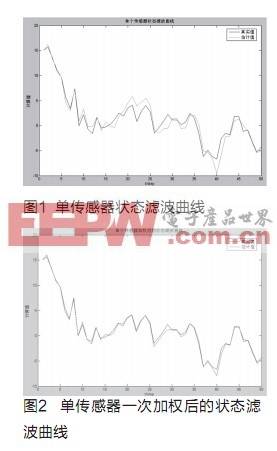
通过仿真,对图1和图2进行比较可以看出,采用最优比例权重进行加权处理的单个传感器的估计精度要高于未采用最优比例权重进行加权的单个传感器的估计精度,此方法可以提高估计精度。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码

