基于电磁场检测的寻线智能车设计
引言
以往的智能车竞赛分为光电组和摄像头组,其中光电组主要是使用光电传感器如红外传感器采集路径信息,摄像头组主要通过采集图像信息识别路径。本文则采用通电导线产生的电磁场对智能车进行引导。使用磁场信号引导车沿一定轨迹行走的优点主要体现在磁场信号具有很好的环境适应性,不受光线、温度、湿度等环境因素的影响。本文对采用通电导线引导小车行进这一设计从物理原理上进行了描述,介绍了小车循迹行走的控制策略,并且具体制作了智能车,对方案进行了验证。
设计原理
根据电磁学,我们知道在导线中通入变化的电流(如按正弦规律变化的电流),则导线周围会产生变化的磁场,且磁场与电流的变化规律具有一致性。如果在此磁场中置一由线圈组成的电感,则该电感上会产生感应电动势,且该感应电动势的大小和通过线圈回路的磁通量的变化率成正比。由于在导线周围不同位置,磁感应强度的大小和方向不同,所以不同位置上的电感产生的感应电动势也应该是不同。据此,则可以确定电感的大致位置。
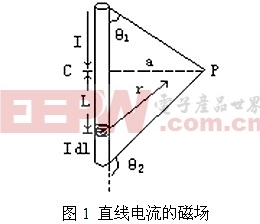
首先,由毕奥-萨伐尔定律知:通有稳恒电流I长度为L的直导线周围会产生磁场,距离导线距离为r处P点的磁感应强度为:
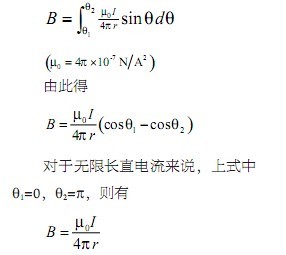
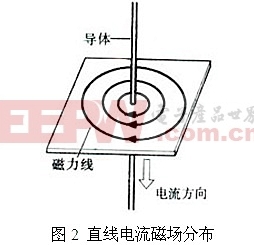
且磁感应强度方向为垂直纸面向里。于是,它的磁力线是在垂直于导线的平面内以导线为轴的一系列同心圆,圆上的磁感应强度大小相同。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码