图像型电子警察系统抓拍延时测量方法设计
3.2 软件程序设计
软件设计主要包括触发判断和计时显示两部分。
3.2.1 触发判断
判断何时启动计时电路开始计时。单片机串口通过缓冲器SBUF接收雷达的速度数据,接收一个比特数据,清除RI标志位,然后再接收下一个数据。抓拍方式不同(车头或车尾抓拍),则触发的条件也不同,触发判断如见表l所示。
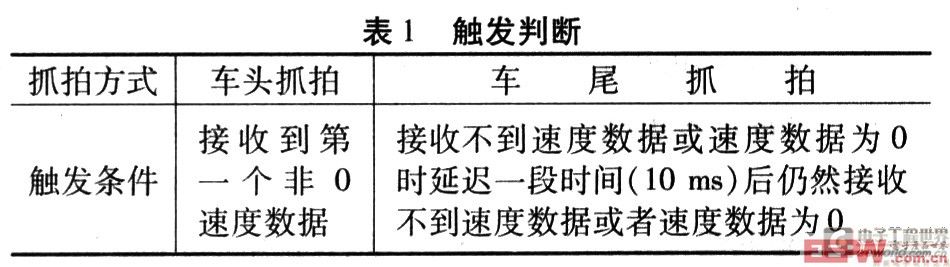
采用车尾抓拍时,由于触发判断时加入了延时,计时电路从10开始计时。
3.2.2 计时显示
以毫秒为单位进行计时和显示控制,关键是配合拍摄需求的静态显示控制,即3位数字同时点亮。具体过程是:设定单片机定时器初值使其产生1 ms定时中断,1ms定时时间到则相应位计数加1,选通相应使能位(个位对应P2.0,十位对应P2.1,百位对应P2.2),通过查表将相应的数字转换为显示码,当计时时间达到999 ms时停止计时显示。图3给出个位的计时显示控制程序流程。
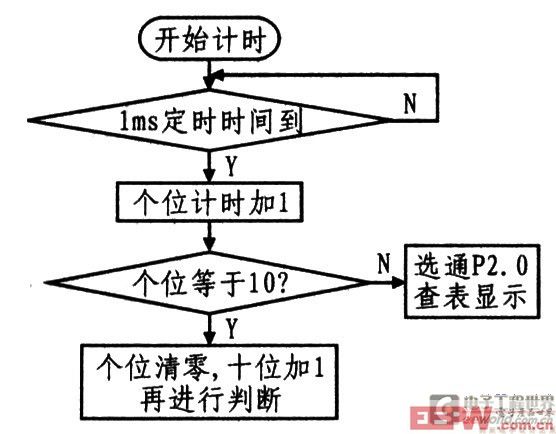
图3 个位的计时显示控制程序流程
注意:数码管的时间显示间隔应与摄像机的拍摄速度相匹配,即要求曝光时间小于时间分辨率。如为了获得1 ms的延时测量分辨率,应将电子警察的快门速度控制在1/l 000 s以下;若快门速度为1/500 s,时间分辨率只能达到2 ms。若两者不匹配,曝光时间大于时间分辨率,则导致时间显示重叠,无法读取正确的时间数值。
4 实验结果
将该计时显示器应用于雷达型电子警察系统,采用具有外触发功能的摄像机抓拍,进行延时测试,分别测量车头抓拍和车尾抓拍的延时,每组测量50个数据。实际测量中,该电子警察系统在车头抓拍时最大延时12 ms,最小延时6 ms,延时非常小,且延迟量稳定。在实验测量车尾抓拍延时时(控制器判断车辆离开的延迟设为500 ms)发现延迟最大值为757 ms,最小值为748 ms,虽然延时较为稳定,但总延迟时间较长。在车速高的区域基本不能使用。
5 结语
结果说明,该计时显示器设计的测量方法能方便有效地测量雷达型电子警察系统的抓拍延时。针对不同视频的抓拍系统,只需更改相应的计时显示器输入端触发方式,即可实现延时测量。因此,该方法具有较好的适应性,扩展性及参考价值。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码
