基于CPLD的开放式四轴运动控制器的设计
(2)定制应用算法函数库。根据实际应用的要求,以控制运动控制器硬件操作的函数库为基础,可以有针对性地威廉希尔 官网app 算法函数。本文以运动控制为例设计了针对运动控制的算法函数库,实现运动规划、伺服控制等功能。其它控制算法和功能也可以在此基础上进一步扩展。运动控制算法函数库的各命令也采用C++语言类的方式进行封装,控制算法类是运动控制器硬件操作类的继承,调用和修改都十分方便,因而在结构上具有很好的开放性。
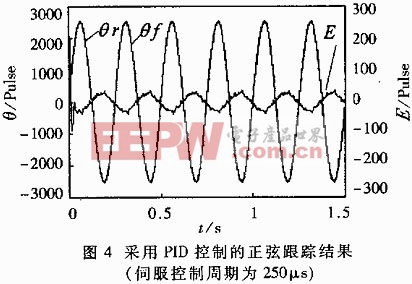
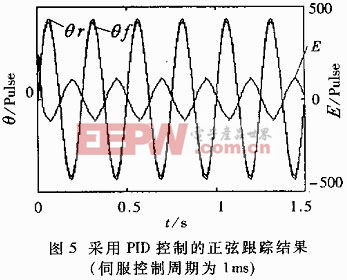
在伺服运动控制算法上,控制器将当前规划的运动位置、进给速度送入伺服控制器与反馈的实际位置进行比较,得到位置跟踪误差,经过位置控制器后,送到D/A转换器,输出伺服驱动器的控制信号。位置控制算法可根据实际的要求采用多种控制策略。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码


