旋转导向钻井稳定平台前馈模糊算法研究
4.1 系统性能仿真分析
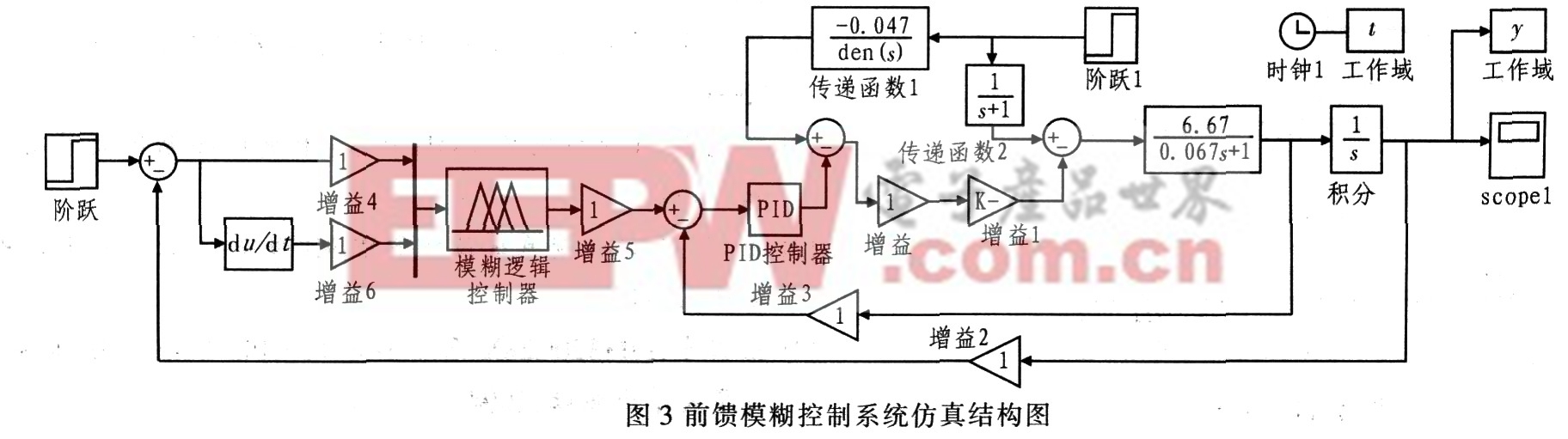
在MATLAB软件中,用FUZZY工具箱按照模糊控制器的控制规则构造模糊控制器,在Simulink中组建如图3所示的稳定平台前馈模糊控制系统的Simulink仿真模型。
为了突出所采用的前馈模糊控制算法的优越性,还对比了采用前馈PID控制算法,通过仿真比较它们的控制性能。其仿真结果如图4所示。
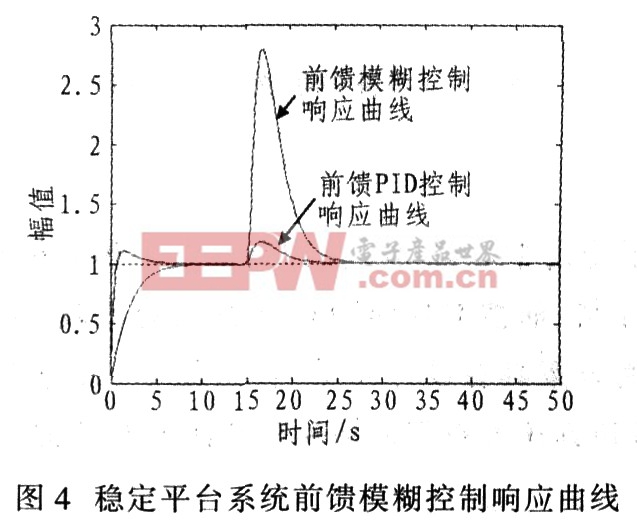
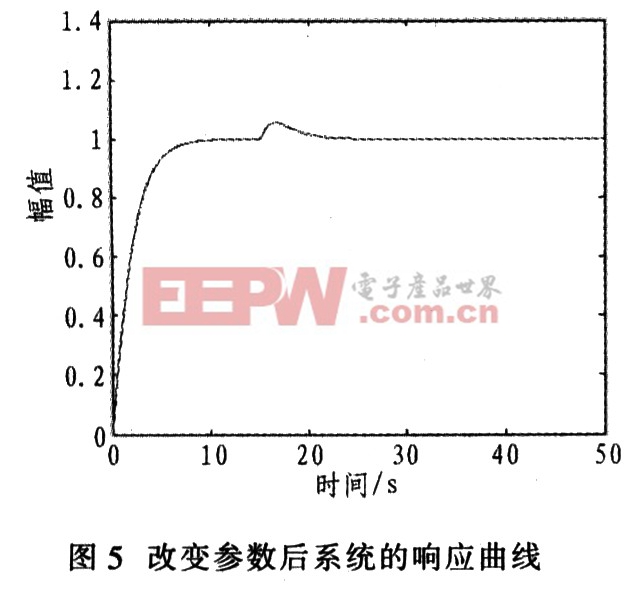
由图4明显发现:前馈模糊控制方式控制性能较好,前馈PID控制的响应速度虽快,但是其抗扰动能力相对较差.在相同扰动的情况下,其超调量过大,系统出现明显的波动。而前馈模糊控制,在无扰动信号时,系统未出现明显超调,而系统运行稳定后加相同扰动,系统也未出现明显波动,并能够很快进入稳定运行状态,抗干扰能力明显加强。由此可见,前馈模糊控制具有响应速度快,抗干扰能力强的特点,因此采用前馈模糊控制稳定平台系统可有效提高系统动态响应。稳定平台串级模糊控制系统的实际使用中,改变系统模型参数后系统响应曲线基本重合,如图5所示。说明前馈模糊控制的导向钻井稳定平台有很好的自适应性和鲁棒性。
4.2 前馈模糊控制抗扰动性仿真
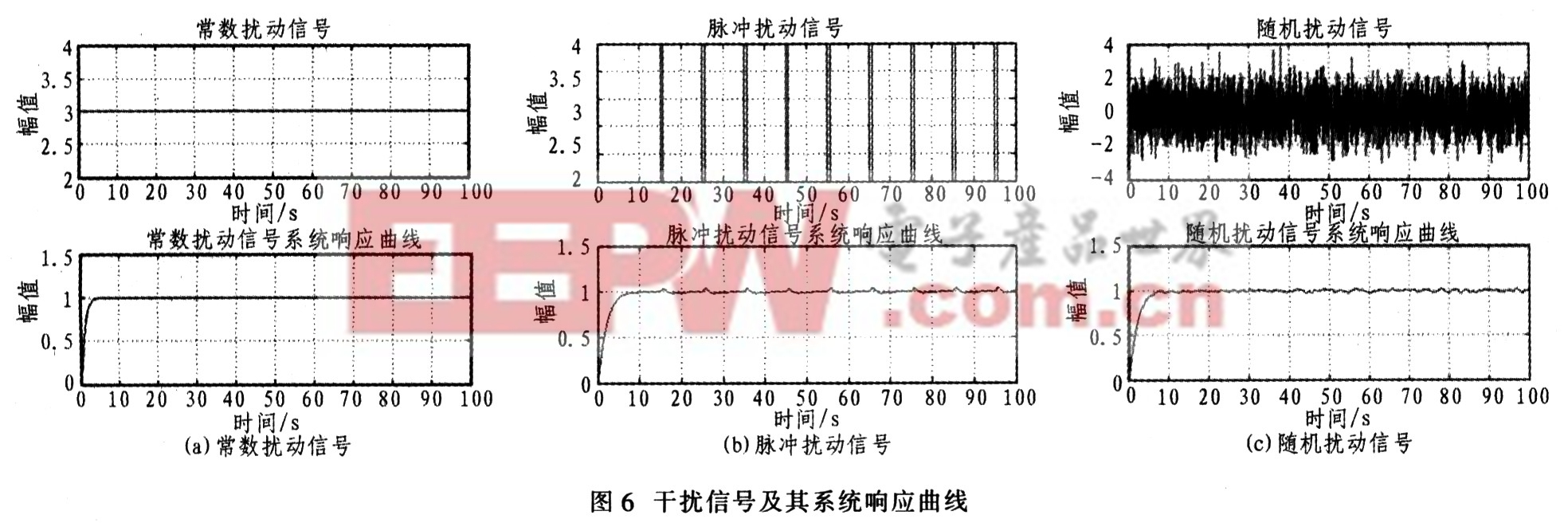
钻井时井下情况复杂,除了工具自身产生的模型参数变化外,其他各种各样的扰动随时都有可能产生,如钻机憋钻、卡钻、岩层性质导致钻头受力不均,钻井液压力、排量波动等。为了测试前馈模糊控制的抗扰动性,分别以常数信号、脉冲信号、产生正态分布的随机信号代表各种扰动,对系统进行抗干扰能力的仿真研究。仿真结果如图6所示。仿真表明,采用前馈模糊控制稳定平台系统能达到很好的控制要求,针对多种干扰,系统的波动很小,能够很快进入稳定运行状态,控制效果良好。
5 结语
建立了稳定平台前馈模糊控制系统的仿真模型,通过对前馈模糊控制、前馈PID两种控制方式的比较,实验得出前馈模糊控制方案具有设计简单、算法简单、系统鲁棒性强等特点。通过仿真还可看到前馈模糊控制能有效抑制各种不确定性的干扰因素。这种控制器结构简单,易于实现,而且结果精度较高。从而验证了前馈模糊控制算法在导向钻井稳定平台控制系统中的可行性。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码